")
В последнее время цены на бытовую технику растут с каждым днем, оставляя многих из нас без желанных помощников по дому. Те, кто мечтал о роботе-пылесосе вынуждены делать влажную уборку вручную и тратить на это много времени и сил. В этой статье мы расскажем вам как собрать робота-мойщика полов своими руками!
Гайд будет состоять из двух частей. В этой инструкции мы подробно разберём материалы и схему подключения, необходимые для создания помощника в домашней уборке. В следующей статье мы расскажем о сборке самого робота и настройке приложения для него. Пока вы будете заниматься своими делами, ваше изобретение будет приводить квартиру в порядок! Им можно будет управлять с помощью смартфона по Bluetooth. Мы будем использовать три ультразвуковых датчика и переключатель с фиксацией для того, чтобы выбирать автономный или ручной режим работы робота.
Материалы:

Рисунок 1. Запасы для создания робота
- Arduino Nano (или любая другая совместимая плата);
- Bluetooth-модуль HC-05;
- Плата драйвера двигателя L293D (также подойдет L293 или любой другой драйвер двигателя);
- Три ультразвуковых датчика HC-SR04;
- Три зажима для ультразвуковых датчиков;
- ЖК-дисплей 16x2;
- Одноканальный релейный модуль 5 В;
- Два мотор-редуктора на 100 об/мин (или от 50 до 500 об/мин);
- Два колеса для двигателей;
- Два зажима для двигателей;
- Мембранный водяной насос 12 В;
- Три литий-ионных аккумулятора 18650;
- Держатель для 3 ячеек;
- 7805 Регулятор напряжения;
- Резисторы 1К, 2К, 10К (по 1 шт.);
- Штекеры и гнёзда;
- Винтовая клемма;
- Кнопка с фиксацией;
- Переключатель включения/выключения;
- Фанера толщиной 6 мм;
- Провода-перемычки;
- Проволока;
- Гайки и болты;
- Насадка для вращающейся швабры (входит в комплект вращающейся швабры и ведра);
- Виниловые трубки;
- Капельница для глюкозы (можно найти в медицинских магазинах);
- Маленькая бутылка с водой (как резервуар для воды);
- Паяльник;
- Дрель;
- Кусачки;
- Отвёртка;
- Плоскогубцы.
Шаг 1: Подготовка основы

Рисунок 2. Схема основы
Для начала нужно подготовить основу нашего робота-мойщика. В качестве материала советуем использовать простую фанеру толщиной 6 мм. Если захотите сделать робота на более толстой основе, рассчитывайте свои размеры в зависимости от колёс, которые будете использовать в сборке. Обратите внимание на простой 2D CAD на рисунке 2, который нужно использовать при подготовке изделия. Вырезаем шаблон ножёвкой, затем используем плоский напильник, чтобы скруглить два угла спереди. После этого шлифуем их наждачной бумагой и красим основание в любой цвет..
Шаг 2: Установите двигатели на основу

Рисунок 3. Закрепление монтажных уголков на основе
Сделайте разметку, соответствующую рисунку 3 (4 см снизу, 3 см сбоку) и болтами прикрутите к основе угловые крепления. На этом месте у нас будет располагаться двигатель. Не забывайте, что слева и справа будут размещены колеса, поэтому корректируйте измерения под те, которые вы выбрали для своего робота, но помните, что если колёса будут слишком большими, швабра будет не полностью касаться пола, из-за чего качество уборки снизится.

Рисунок 4. Двигатели на основе.
Перед присоединением двигателей к кронштейнам, припаяйте к ним два провода (рисунок 4). После это будет сделать тяжелее.

Рисунок 5. Основа с колесами
Просверлите восемь отверстий для проводов двигателей (2,5 см от колеса, 0,5 см друг от друга), затем присоедините к изделию колёса. Убедитесь, что при вращении им ничего не мешает, если такая проблема появилась, подрежьте основу.
Шаг 3: установка зажимов

Рисунок 6. Отверстие для швабры
Следующий шаг — проделать отверстие для вашей швабры. Ориентируйтесь на её размер и сделайте индивидуальные вычисления, чтобы швабра идеально встала в основу.

Рисунок 7. Зажимы для швабры
Установите зажимы, чтобы швабра не упала во время уборки пола. Их можно заказать в любом интернет-магазине или напечатать на 3D-принтере. Для проектирования таких деталей отлично подойдет программа TinkerCAD — она проста в использовании и не требует серьёзных системных требований от вашего компьютера. Расположите зажимы таким образом, чтобы один (посередине) был направлен вперёд, а два других смотрели влево и вправо под углом 45 градусов.
Шаг 4: полная схема устройства

Рисунок 8. Схема робота
Прилагаем полную схему со всеми частями робота. Она была разработана с помощью приложения Fritzing. Вам нужно будет строго следовать схеме в следующих шагах. На ней видны все нужные нам подключения. Обратите внимание, резисторы 1K и 2K подключены к контакту Tx на Arduino для создания делителя напряжения.
Шаг 5: Сборка схемы

Рисунок 10. Подключение разъёмов
Возьмите кусок перфорированной платы (нулевой печатной платы). Чтобы разместить Arduino. Сначала припаяйте несколько разъёмов с гнёздами, а затем подключите к каждому разъём со штекерами. Он соответствует каждому контакту на Arduino. Все внешние компоненты будут подключены к этим штекерным разъёмам (смотри рисунок 9). Если у вас есть трудности с процессом пайки, посмотрите видео о том, как быстро и легко научиться паять.

Рисунок 11. Подключение регулятора и переключателя
Чтобы подключить ЖК-дисплей, снова припаяйте несколько гнёзд. Добавьте на печатную плату винтовую клемму (для подключения питания от батареи), фиксирующий переключатель и регулятор напряжения. Припаяйте несколько штекерных разъёмов перед регулятором напряжения (смотри рисунок 11).

Рисунок 12. Добавляем провода
Теперь добавьте все резисторы и соедините всё по схеме с помощью проводов.
Зачем использовать внешний регулятор напряжения, если он уже встроен в Arduino? Поскольку мы используем множество компонентов, которые должны питаться от 5 В (3 ультразвуковых датчика, модуль bluetooth, драйвер двигателя, реле, ЖК-дисплей), Arduino может перегреться и повредить его регулятор. Мы будем подключать некоторые компоненты к внешнему стабилизатору напряжения 5 В во избежание подобных ситуаций.
Шаг 6: подключение к основной плате

Рисунок 13. Подключение по схеме
Продолжайте следовать схеме из шага 5. Начните с подключения модуля Bluetooth, затем релейной платы и драйвера двигателя. Последними подключите сами двигатели к их драйверу. Рекомендуем размещать элементы с помощью клея (Рисунок 14).

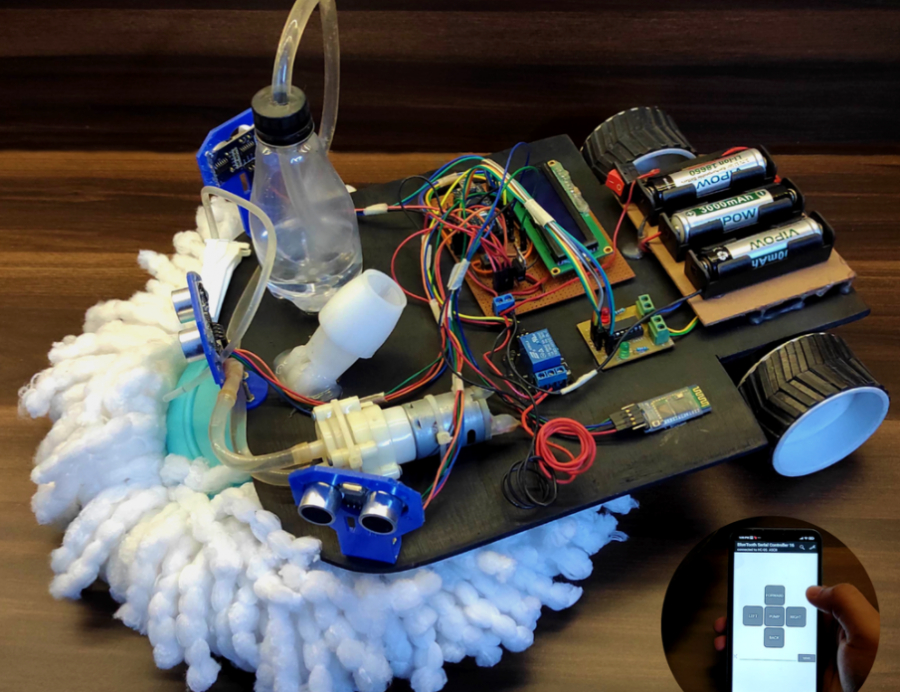
Рисунок 14. Итоговый вид.
Подключите все три ультразвуковых датчика к соответствующим контактам с помощью перемычек, как показано на схеме. Поскольку наши зажимы датчиков уже на месте, приклейте датчики к зажимам горячим клеем.

Рисунок 15. Ультразвуковые датчики.
Шаг 7: механизм распыления воды

Рисунок 16. Водяной насос
Для распыления воды мы будем использовать мембранный насос на 12 В с очень простым механизмом. Есть две трубы: входная, которая идёт к резервуару для воды и выходная, которая идёт к швабре.
Для входной трубы используем трубку толщиной 8 мм, а для выхода более тонкую. В качестве резервуара для воды используется небольшая бутылка объемом 200 мл. Убедитесь, что вы подсоединили впускную и выпускную трубы в соответствии с маркировкой на водяном насосе (рисунок 16).
В этой статье мы проделали основную работу — разобрались со схемой подключения, сделали основу для будущего робота и присоединили основные элементы. В следующей части мы завершим подключение робота и настроим приложение для робота-помощника. Совсем скоро вы сможете гордо презентовать вашего робота членам семьи, самое главное — не потерять запал и собрать устройство до конца!








