")
Основное меню
Бесконечный зеркальный многогранник

Перед вами впечатляющий ансамбль цвета, оптики и геометрии, способный загипнотизировать любого. Это оптическая иллюзия, обусловленная множеством зеркал и воплощённая в причудливой форме додекаэдра (двенадцатигранник). Несмотря на фантастический вид, она достаточно проста для самостоятельной сборки. Поэтому сегодня мы делимся с вами инструкцией этого сногсшибательного проекта на Arduino и светодиодах.
Необходимые материалы:
– Пластик для 3D-принтера (1 кг PETG, 1 кг PLA);
– Светодиодная лента 5 м, 144 светодиода/м, WS2812B;
– Блок питания 5В 30А 150 Вт;
– Одножильные провода 20WAG, красный и чёрный (2 м);
– Многожильный медный провод 0,5мм (2 м);
– Одножильный медный провод 0,6 мм;
– Зеркальный акриловый лист 2 мм;
– Arduino Mega или Arduino Uno;
– Винты под шестигранник M3x8 (100 шт.);
– Термоусадочные трубки;
– Супер-клей;
– 3-контактный разъём;
– Оплётка для проводов 5 мм.
Шаг 1: 3D-печать

Рис. 1 Элементы додекаэдра
Первым делом нужно изготовить элементы опорной конструкции, и 3D-печать – лучший способ достижения цели. Особенно при том, что все детали уже смоделированы и доступны для скачивания на нашем сайте (файлы в формате STL).
Но не распечатывайте всё сразу. Сначала убедитесь, что модели совместимы с остальными элементами сборки. Если вы хотите использовать нестандартные светодиоды, то размеры рамки придётся изменить. Следите за тем, чтобы ширина светодиодной ленты была меньше, чем ширина стоек, а угол между двумя соседними гранями равнялся 116°.
В дальнейшем потребуется припаять ленты к раме, поэтому при печати используйте высокотемпературный пластик, такой как PETG. Его повышенная прочность послужит дополнительным бонусом, поскольку зеркала тяжёлые и нуждаются в хорошей опоре.
Цвет выбирайте на своё усмотрение, рама будет видна только внутри сборки. Для достижения визуального эффекта бесконечной глубины рекомендуется использовать чёрный.
Настройки каждого принтера индивидуальны и непредсказуемы, но общие рекомендации для печати есть:
– Высота слоя 0,2 мм;
– Периметры 3;
– Заполнение 15%;
– Без поддержек.
Для каркаса нужно напечатать 30 отдельных стоек (файл Strut). Три из них должны немного отличаться от остальных для создания входного угла (файл Strut Input).
Прочие детали, не являющиеся частью рамы, можно напечатать пластиком PLA, используя аналогичные настройки.
Шаг 2: Каркас
Для сборки вам потребуется сделать много маленьких штифтов из нити для 3D-принтера, длиной около 10 мм.
Сборку начните с тех самых трёх стоек входного угла. Вклейте по одному штифту в левое отверстие на одном конце каждой стойки (рис. 2).

Рис. 2 Штифты
При склеивании старайтесь сразу зафиксировать все три стойки в один угол, как на рисунке 3, иначе потом будет сложно закрепить остальные части.

Рис. 3 Углы между трёх граней
Соберите раму, добавляя к каждому образованному концу по две новых стойки до тех пор, пока конструкция не сложится в один большой додекаэдр. Не забывайте использовать штифты на склейках, это увеличивает прочность.

Рис. 4 Полусобранный додекаэдр
Шаг 3: Светодиоды и провода
На этом сложном этапе главное сохранять спокойствие и не торопиться. Если что-то не получается, лучше отойти в сторону, подышать и вернуться к работе позже, чем рисковать, взрывая светодиоды. Полосы могут выйти из строя одним мощным хлопком при неосторожном обращении с проводкой. Сохраняйте разум холодным и следуйте рекомендациям.
Для удобства изготовьте картонный макет, на котором можно нарисовать схему подключения и разводки проводов. Это поможет не запутаться в процессе. Для тех, кто не знаком с процессом пайки, у нас есть обучающее видео.
Вот основные правила успешной коммутации:
1) Каждая положительная клемма подключена к двум другим положительным клеммам в общем узле
2) Каждая отрицательная клемма соединена с каждой отрицательной клеммой.
3) Линия данных представляет собой одну единственную змейку, которая проходит по определенной схеме по всему додекаэдру. Нужно следовать направлению светодиодных лент (у большинства есть направляющие стрелки).

Рис. 5 Пример схемы подключения
В силу физических и математических законов, додекаэдры являются «неевклидовыми»: в их гранях нет ни одного пути, который не пересекался бы с другим. Учитывая это, нужно «возвращаться» несколько раз в цикле данных, чтобы охватить все грани фигуры. Рама имеет небольшие встроенные туннели, которые можно использовать для прокладки «обратной» линии данных под светодиодной лентой (рис. 6). Вы можете распознать эти переходы на рисунке схемы.

Рис. 6
Используйте одножильный провод 20AWG для подачи питания. Разделите один его конец на три части и припаяйте к ним отрезки медной проволоки, закрыв термоусадочной трубкой. Полученные провода проденьте через входной угол конструкции, как на рисунке 7.

Рис. 7
Каждая грань додекаэдра состоит из 30 полосок по 17 светодиодов.
Для начала приклейте первые 6 полосок, начиная от входного угла, по пятиугольнику и дальше, не забывая о направлении потока данных.
Пользуясь правилами, упомянутыми выше, начните паять. Периодически тестируйте работоспособность соединения, подключая силовой кабель к Arduino (после каждых 3-4 полосок).
Вот еще несколько советов:
– Не держите паяльник слишком близко к светодиодам, так как это может им навредить;
– Старайтесь не перегревать припой, это может привести к повреждению ленты или 3D-печатных деталей;
– Если припой не прилипает, поцарапайте поверхность меди ножом.
Шаг 4: Питание и микроконтроллер

Рис. 8 Коробка с блоком питания и Arduino Mega
Пришло время позаботиться о питании и управлении системы. Для удобства лучше сделать коробку и компактно разместить в ней блок питания, Arduino и несколько кнопок управления светом. Вы можете легко сделать это, используя предоставленные ранее STL-файлы для 3D-печати.
Прикрутите блок питания к основанию коробки с помощью винтов и шестигранного ключа. Перед подключением проводов убедитесь, что у них есть специальная входная заглушка.
Добавьте 3-контактный разъем и проденьте провода сквозь отверстие в боковой стенке коробки. Подключите одножильные провода (фаза, земля и нейтраль) к соответствующим клеммам на блоке питания.
Если ваши светодиоды работают от напряжения 5 В, то можете подключить Arduino непосредственно к источнику питания; если же вы используете ленту на 12 В, вам понадобится преобразователь, чтобы получить желаемое напряжение 5 В.
Добавьте в сборку дополнительные элементы управления, чтобы творить цветомузыку было удобно. Например, на рисунке 9 изображены кнопки, переключающие режимы узора и цвета, и потенциометры, регулирующие яркость, насыщенность и скорость. Широту интерфейса определяйте на своё усмотрение.

Рис. 9 Кнопки и потенциометры
Шаг 5: Программирование
Здесь всё просто: для программирования светодиодов скачивайте исходный код (Файл INO) и отправляйтесь прямиком в среду разработки Arduino IDE.
Установите библиотеку FastLED и вперёд – экспериментировать!

Рис. 10 Так выглядит додекаэдр без зеркал
Шаг 6: Зеркала
Сборка уже радует глаз, но для эффекта оптической иллюзии ей не хватает зеркал. Приложим ещё немного усилий и добавим отражающие элементы.
Сначала нужно вырезать необходимые формы из акрилового стекла. Очень важно на этом этапе не снимать защитную пленку: акрил легко царапается, велика вероятность испортить поверхность.
Распечатайте трафарет (там же, в STL-файлах), маркером нарисуйте 12 пятиугольников и вырежьте их с помощью лобзика. (рис. 11, 12 и 13).

Рис. 11 3D-печатный трафарет

Рис. 12 Процесс резки акрила

Рис. 13 Зеркала-пятиугольники
Наконец, установите зеркала в раму додекаэдра, тщательно протерев их перед этим. Следите, чтобы в помещении не было пыли.
Начинайте установку с вершины, где вход питания, потом переходите к трём соседним граням и дальше, пока не заполните все поверхности додекаэдра зеркалами. Обратите внимание, что отражающие стороны акрила должны быть обращены внутрь.
В завершении поставьте додекаэдр на подставку и включите питание. Всё готово! Мерцающая бесконечность перед вами, смотрите и расслабляйтесь.

Может, вам уже доводилось мастерить что-то со светодиодами и оптическими фокусами? Делитесь своими проектами с нами, всегда рады наблюдать за творчеством единомышленников.
Вдохновения и успехов!
Автоматизированные шахматы

Апгрейд классической настольной игры – то, что нужно в эпоху массовой цифровизации. Несмотря на растущую популярность игровых онлайн-площадок и электронных приложений, многие шахматисты по-прежнему крепко держатся за аутентичность живой игры с реальными фигурами. Им не всегда удаётся встретиться с единомышленниками, многие говорят, что найти подходящего соперника невообразимо трудно.
Но у DIY- культуры нашлось своеобразное решение проблемы – умные автоматизированные шахматы. Они совмещают натуралистичность деревянных фигур и практичность цифровых программ.
Умные шахматы – это игрок, который всегда готов появиться по ту сторону доски и сыграть за чёрных. Он не только мыслит как человек, но ещё и фигуры сам передвигает, оставаясь совершенно невидимым и беззвучным. Что это: магия поттерианы или запрещённые технологии?
На деле, это всего лишь скрытый подвижный механизм на осях XY под управлением знаменитой платы Arduino.
Сегодня мы делимся с вами руководством по сборке умных шахмат.
Список деталей:
– Линейные рельсы с V-образным пазом 20x20 (5 шт. различной длины – 315 мм, 350 мм, 395 мм и 2 шт. по 345 мм);
– Угловые кронштейны 90 градусов (10 шт.);
– Шкив GT2-20, отверстие 5 мм (2 шт.);
– Шкив GT2 (8 шт.);
– Ремень GT2 3,5 м;
– Arduino Nano;
– Шаговый двигатель Nema 17, 200 шагов/об, 12V 350mA (2 шт.);
– Драйвер шагового двигателя A4988 (2 шт.);
– LCD модуль;
– Аркадные кнопки 23,5 мм (2 шт.);
– Электромагнит с удерживающей силой 5 кг;
– Диод 1N4001;
– Силовой транзистор TIP 120;
– Концевой микропереключатель с роликом (2 шт.);
– Герконовый переключатель 14,5 мм (64 шт.);
– Резистор 1 кОм;
– Мультиплексор CD74HC4067 (4 шт.);
– Клеммная колодка DC Jack;
– Межплатные соединители (штыри однорядные);
– Винтовые клеммы (10 шт.);
– Макетная плата 50 x 100 мм (3 шт.);
– Разъём HE10 (4 шт.);
– Ленточный кабель (8 шт.);
– Набор деревянных шахматных фигур;
– Наклейка «шахматная доска», клетки 37 x 37 мм;
– Магниты 8 x 3 мм (32 шт.);
– Стенки коробки из пенокартона – 462 x 462 x 5 мм; 462 x 462 x 10 мм; 462 x 80 x 10 мм (2 шт.); 442 x 80 x 10 мм (2 шт.);
– Колёса для V-образных рельсов (8 шт.);
– Алюминиевые распорки 5 х 6 мм (4 шт.);
– Эксцентриковые распорки для колёс (4 шт.);
– Наборы гаек, болтов, винтов, шайб и шестигранников;
– Опорные 3D-детали (файлы для печати в Приложении).

Рис. 1. Здесь видны рельсы, двигатели, электромагнит и различные детали для крепления – будущая система XY

Рис. 2. Электроника
Шаг 1: Электромагнитная тележка на осях X и Y

Рис. 3. То, что скрыто внутри
Заставить фигуры волшебным образом перемещаться можно силой магнитов. Представьте систему, в которой скрытый механизм перемещается под шахматной доской, генерируя магнитное поле. Все фигуры обладают собственными магнитами, поэтому подвижный механизм (электромагнитная тележка) может создавать связь с ними и плавно двигать по полю одной клетки к другой.

Рис. 4. Оси XY, электромагнитная тележка (Trolley) и два шаговых двигателя (Motor A и B)
Электромагнит создает поле лишь под воздействием электрического тока, и в этом его преимущество: тележка может спокойно перемещаться в пространстве, не утягивая за собой всех подряд. Напряжение подаётся на неё скоординированно и позволяет установить магнитное притяжение только для одной фигуры.
Переключать подачу питания легко с силовым транзистором TIP 120, управляя им прямо с Arduino.

Рис. 5. Получая напряжение на базу (B), транзистор позволяет току идти через коллектор (C) на эмиттер (E)
За передвижение тележки отвечают шаговые двигатели, рельсы, колёса и ремни. На рисунках ниже представлены возможные варианты перемещений тележки в соответствии с работой двигателей:

Рис. 6

Рис. 7
– если вращается только один двигатель, возникает диагональное смещение тележки, как на рис. 6;
– при вращении двух двигателей в одном направлении производится горизонтальное смещение (рис. 7, справа);
– если двигатели вращаются в противоположных направлениях, тележка движется по вертикали.

Рис. 8. Перемещение по оси X с помощью боковых колёс

Рис. 9. Перемещение по оси Y с помощью колёс тележки
Для гладкого беспрепятственного скольжения очень важна контактная сила и пространство между колёсами и рельсами. Если его слишком мало, скольжение будет тугим, если слишком много – неточным. Получить хорошую контактную силу только за счёт конструкции нельзя, должна быть система настройки. Эксцентриковые распорки нужны именно для этого: поворачивая их в разные стороны, можно увеличить или уменьшить зазор рядом с колесом, и тем самым добиться наилучшего скольжения.

Рис. 10 Распорки в конструкции тележки
Последовательность действий (рис. 11):
1) Соберите тележку.
2) Установите её на рельс и отрегулируйте зазоры трения с помощью эксцентриковых распорок. Соберите и добавьте две опоры для шкивов на каждом конце рельса.
3) Соберите основную раму из четырёх внешних рельсов.
4) Соберите опоры шкивов.
5) Установите рельс тележки на основную раму, сделайте фрикционные зазоры и добавьте опоры шкивов.
6) Установите шаговые двигатели.
7) Добавьте ремни и отрегулируйте их длину так, чтобы обеспечить хорошее движение двигателей.

Рис. 11 Поэтапная сборка тележки и рельсов
Шаг 2: Шахматы и коробка

Рис. 12 Подготовка деталей
Здесь шахматная доска – не просто поле боя. Она оснащена системой магнитных датчиков и может безошибочно определять положение фигур.
Под каждой клеткой располагается герконовый переключатель. Когда фигура занимает позицию, её магнит активирует датчик геркона, расположенного прямо под ней. Система сравнивает активированные датчики до и после хода, определяя таким образом изменения на доске.

Рис. 13 Так должна выглядеть внутренняя сторона доски
Аркадные кнопки и экранный модуль нужны для удобства интерфейса. С их помощью можно устанавливать режимы игры, указывать неразрешённые ходы и управлять временем обратного отсчёта.
Последовательность действий (рис. 14):
1) Наклейте «шахматную доску» на основную поверхность и сделайте отверстия для кнопок и экрана.
2) С обратной стороны начертите точно такую же доску. Проследите, чтобы её положение полностью совпадало с положением первой доски, буквально клетка в клетку.
3) Закрепите все герконы на обратной стороне, каждый по центру клетки. Затем соедините их в комплекты по 8 шт., используя ленточный кабель. Должно получиться 8 широких лент.

Рис. 14
4) Закрепите ленты на доске с помощью клея, затем установите кнопки и экран.
5) Завершите монтаж проводов.
6) Удалите войлок в основании фигур и закрепите магниты с опорами на том месте (рис. 15)

Рис. 15
Теперь пришло время собрать коробку. Она понадобится, чтобы спрятать механизмы, добавить эстетики и зафиксировать расстояние между электромагнитом и плоскостью шахматной доски.

Рис. 16
Ориентируйтесь по рисунку 16, чтобы обеспечить хорошее взаимодействие магнитных полей.
Части пенокартона склейте вместе и в одной из стенок просверлите отверстие для подключения разъема питания.

Рис. 17
Шаг 3: Электроника

Рис. 18
1) Разложите перед собой макетные платы.
2) Установите штыревые разъёмы и винтовые клеммы.
3) Приклейте макетные платы к специальным опорам. Спаяйте все выводы, разъёмы и провода, используя схему подключения на рис. 19.
4) Установите печатные платы, соединяя все устройства между собой так, как это показано на рис. 19.

Рис. 19 Схема подключения устройств
– Шаговые двигатели подключите к драйверам A4988
– Аркадные кнопки и концевые выключатели подсоедините к Arduino, используя внутренние подтягивающие резисторы
– Силовой транзистор используйте как переключатель для управления электромагнитом тележки, а диод свободного хода – для защиты Arduino от разрядного тока.
– Экран можно подключить к Arduino через I2C связь, тем самым снизив количество используемых контактов. Линия SCL идёт к пину A5, а линия SDA – к пину A4.
– Подключить 64 геркона напрямую к Arduino не получится, контактов не хватит. Поэтому используйте мультиплексоры, подключая герконы к их канальным выводам C0 – C15.
Шаг 4: Аппаратно-программное обеспечение
Теперь, чтобы вдохнуть жизнь в сборку, необходимо заняться программированием. В приложении есть исходный код на языке Arduino, но для его использования нужно установить две библиотеки:
– Wire.h
– LiquidCrystal_I2C.h
Шахматная программа Micro Max с открытым исходным кодом станет для вас тем самым невидимым игроком напротив. В её основе лежат универсальные алгоритмы Minimax и Alpha-Beta. Первый работает как мозг человека: анализирует возможные ходы и составляет разветвлённое дерево решений. Но в чистом виде не является удобным: анализ бесчисленных возможностей шахматной партии требует серьёзных вычислительных мощностей. Arduino, при всех своих достоинствах, не может обеспечить этого.

Рис. 20 Разветвлённая структура принятия решений
К счастью, алгоритм Alpha-Beta трудится над тем, чтобы обрезать лишнее. Он оценивает начальные варианты и выбирает только одну ветку, отсекая остальные. Быстрый анализ и отсечение он делает при каждом новом ответвлении и, в итоге, приходит к конечному результату максимально прямым путём, без лишних сбоев и перегрузок.
Не забывайте, что в ваших силах создать собственный ИИ или расширить Micro Max дополнительными функциями: шахматы с человеком удалённо, игра в "пьяницу" с ПК, режим тренировки в шотландском дебюте. Может, вы уже определились, с чего начать? Или даже задумались об апгрейдах умных шахмат? Напишите нам, будем рады вашему мнению.
Удачи в начинаниях!
Приложения:
2) Исходный код
Светодиоды, Arduino и левитация – как собрать магнитную лампу

Начинающий 3D-дизайнер Том Оуверкерк показал нам удивительное сочетание развитых технологий и уютного волшебства в своём новом проекте на Arduino. Настольная лампа с парящими светодиодами выглядит эффектно и на какое-то время сбивает с толку. Но магия, лежащая в основе, очень проста: один магнит, спрятанный наверху, притягивает второй магнит, спрятанный в корпусе рассеивателя со светодиодами. Простая физика, а выглядит волшебно. Интересно, как такое собрать?

Инструкция по созданию магнитной светодиодной лампы уже перед вами. Главное, на что стоит обратить внимание перед сборкой – 3D-печать. Том Оуверкерк смоделировал здесь каждую деталь. Он добился идеального соотношения размеров и форм, и, собрав все элементы вместе, получил устойчивую и практичную конструкцию, в которой еще и магниты можно спрятать.
Для тех, кто чувствует себя уверенно в 3D-моделировании, разработка лампы с оригинальным дизайном может стать хорошей творческой задачей, но не обязательной в рамках описанного проекта. Ведь Том поделился необходимыми 3D-моделями в формате STL на специальной площадке Cults, а мы сделали их доступными для скачивания на нашем сайте.
Таким образом, от моделирования можно отказаться и сразу приступить к сборке проекта. Самое время узнать, какие материалы понадобятся в процессе:
– Белый пластик для 3D-принтера;
– Светодиодная лента WS2812 60LED;
– 2 неодимовых магнита 12х5 мм;
– Arduino Nano Every;
– Блок питания для светодиодной ленты 5V;
– Разъём питания гнездо 2.1х5.5 мм 12V с клеммной колодкой;
– Силиконовый белый провод 22AWG (0,35 мм2);
– Монтажные провода.

Рис. 1. Все вышеперечисленные материалы
Основные инструменты:
– 3D-принтер
– Паяльник
– Плоскогубцы
– Отвёртка
– Суперклей
Шаг 1: Распечатать детали

Рис. 2. LAMP UNDERSIDE – основание лампы; LAMP BASE – основной корпус; DIFFUSION BODY – рассеиватель; DIFFUSION TOP – крышка рассеивателя; LAMP TOP – верхняя часть лампы; TOP CAP – верхняя крышка.
На этом рисунке конструкция лампы представлена в полусобранном виде. Это не попытка привить нам размышления о целостности, а всего лишь полезная шпаргалка на время сборки. И пригодиться могут не только визуальные образы деталей, но и их оригинальные названия: часто это помогает избежать путаницы в значениях и смыслах.
Поскольку 3D-модели уже есть, вам остаётся только подготовить их к печати с помощью программы-слайсера (Cura, Simplify3D, Craftware), разложить STL-файлы на тонкие слои, чтобы объяснить принтеру на его языке (G-code), как нужно выкладывать пластик.
По настройке печати есть всего две рекомендации: заполнение (плотность) 20-100% и печать без поддержек (по возможности). Остальные настройки – на ваше усмотрение, доверяйте личному опыту.
Если же вы совсем новичок в 3D печати, то ни в коем случае не поддавайтесь суете и не торопитесь. Изучите настройки, поиграйтесь с ними на тренировочной модели и приготовьтесь к тому, что не все детали получаются с первого раза.
А если вы только мечтаете о своём 3D принтере, то переходите в наш телеграм канал, где мы собираемся разыгрывать парочку таких красавцев среди подписчиков!
Шаг 2: Собрать рассеиватель и магнитную ось.

Рис. 3
Действия на этом этапе могут показаться сложными и запутанными. Но мы постараемся провести вас максимально ровным и простым путём.
Цель всей сборки – проложить стабильную электрическую цепь. Цель данного этапа – связать кучку светодиодов с магнитом, чтобы он притягивал их к себе.
Прежде, чем начать, подготовьте необходимые материалы:
– три провода по 130 мм в длину (отрежьте от силиконового провода 22AWG);
– кусок светодиодной ленты, который легко помещается внутри рассеивателя;
– паяльник;
– рассеиватель, его крышка и верхняя часть лампы;
– магниты и суперклей.
Примерная последовательность действий:
1) Припаяйте все три провода к контактам светодиодной ленты, как на рисунке 4, а противоположные концы пометьте опознавательными знаками, чтобы не запутаться, когда придёт пора подключать их к Arduino.

Рис. 4
2) Протяните провода через маленькое отверстие в корпусе рассеивателя, и тяните до тех пор, пока светодиоды не окажутся внутри, как на рисунке 5. Нанесите немного клея на обратную сторону светодиодной ленты и аккуратно прижмите её к стенкам рассеивателя: светодиоды должны прочно закрепиться здесь.

Рис. 5
3) Заплетите косичку из проводов (рис. 6). В основном это делается ради удобства, но и доля эстетики есть.

Рис. 6
4) Возьмите один магнит и приклейте на внутреннюю сторону крышки рассеивателя (рис. 7).

Рис. 7
5) Второй магнит установите в верхней части лампы, как на рисунке 8.

Рис. 8
Закройте рассеиватель крышкой и проверьте притяжение ваших магнитов. Если всё было сделано правильно, то рассеиватель будет тянуться ровно вверх, как гелиевый шарик.
Магнитная ось готова, теперь нужно позаботиться об электропитании и управлении.
Шаг 3: Подготовить блок питания
Это маленькое подготовительное действие позволит создать площадку для дальнейшей связи светодиодов с Arduino.
Возьмите разъём питания 12V с клеммной колодкой (тот, что зовётся мамой) и приклейте к основанию лампы, как на рисунке 9.

Рис. 9
Теперь возьмите два монтажных провода (красный и чёрный) и подсоедините к клеммным колодкам (рис. 10)

Рис. 10
Эти провода потянутся к пинам Arduino уже на следующем этапе, но пока пусть полежат здесь.
Шаг 4: Закрепить и спаять

Рис. 11
На рисунке 11 видно, как провода от светодиодов проходят сквозь специальное отверстие в подставке и фиксируются изолентой с обратной стороны: это сделано, чтобы обезопасить сборку от внезапного вылета светодиодов и проводов далеко вверх.
Обязательно отрегулируйте высоту, на которой располагается ваш рассеиватель света. Он не должен быть слишком высоко, чтобы вся конструкция не испытывала напряжения от чрезмерного магнетизма, но и слишком низко располагать его не стоит: ослабнет влияние верхнего магнита – пропадёт вся магия. Не поленитесь и потратьте время на поиск золотой середины. а потом закрепите светодиодный провод, как на рис. 11.
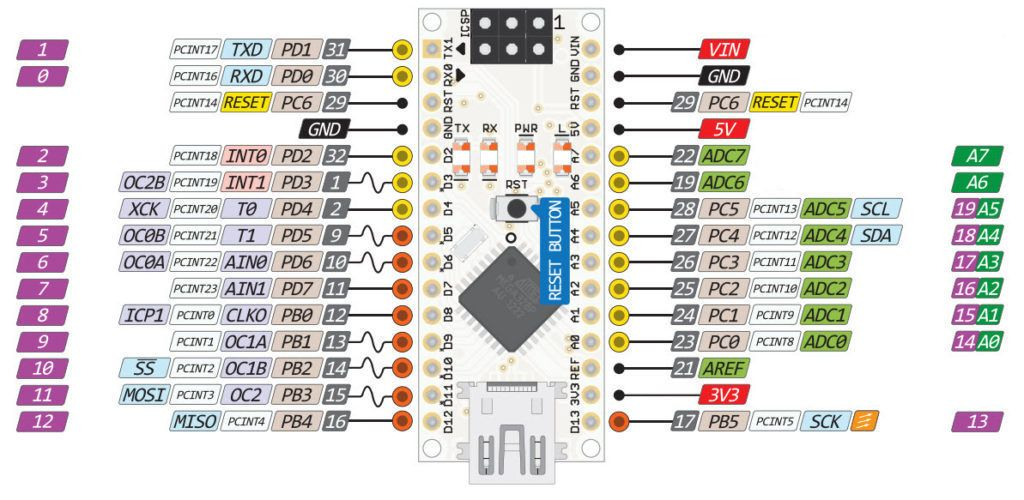
Теперь можно взяться за паяльник. Для наглядности мы разместили распиновку Arduino Nano Every чуть ниже (рисунок 12).
1) Вернитесь к тем двум проводам, которые остались у разъёма питания, и подсоедините их к пинам VIN и GND на Arduino.
2) Возьмите провода светодиодной ленты и припаяйте их к пинам GND, V5 и цифровому порту (D1 – D12). Надеемся, что вы не забыли как-то обозначить провода перед тем, как завязать в косичку.

Рис. 12
Мы всё спаяли, а значит пора двигаться дальше, к финальному этапу.
Шаг 6: Программирование Arduino
Подробно о принципах работы Arduino мы рассказывали ранее. Если вы еще не сталкивались с программированием этой платформы, то первое, с чего стоит начать – установка Arduino IDE (локальная копия). Это не просто ПО с командной строкой, это самый настоящий мост между мирами. Здесь люди и аппаратные платформы говорят на одном языке и помогают друг другу развиваться. Ни один Arduino-проект не обойдется без программной среды. Включая тот, что мы только что собрали.
Светодиодная лампа – очень приятный проект для программирования, потому что для управления светодиодами есть специальная библиотека FastLed. Нужно зайти в Arduino IDE, открыть Library Manager, найти в нём нужную библиотеку и установить.

На этом сборка магнитной левитирующей лампы завершена. Для вас открывается бесконечная дорога апгрейдов и дополнений. Заметили, как много свободных входов/выходов осталось на платформе? Может, стоит задуматься о расширении функционала?
Если у вас появились идеи по улучшению сегодняшней сборки, обязательно поделитесь с нами.
Всем решившимся на реализацию проекта – успехов и вдохновения!
До встречи в будущих проектах!
DIY лазерный гравер

Начните год с создания чего-то необычного и, в долгосрочной перспективе, полезного. Мы подготовили инструкцию по сборке домашнего лазерного станка для гравировки. Сфера применения такого станка широкая: начиная с изготовления оригинальных эмблем, логотипов и деревянных гравюр и заканчивая дизайном мебели, предметов интерьера и чехлов для смартфонов. Собрать лазерный гравер высокого разрешения довольно сложно, но процесс обещает быть интересным. Благодаря Сураджиту Маджумдару, изобретателю из Индии, который собственноручно собрал этот гравер, мы теперь знаем, как сделать свой домашний станок.
Для реализации проекта нам понадобятся следующие компоненты:
– аппаратная платформа Arduino Nano;
– фокусируемый лазерный модуль (выходная мощность – 250 мВт, длина волны – 650 нм);
– два драйвера шагового двигателя A4988;
– транзистор IRFZ44N N-канальный;
– линейный стабилизатор напряжения LM7805;
– радиатор для лазера;
– радиатор IC;
– конденсатор (ёмкость – 1000uF);
– два резистора (10 кОм и 47 Ом);
– однорядные штыревые разъемы для Arduino;
– клеммник винтовой;
– разъем JST 2.0 с кабелем;
– колпачок перемычки 2,5 мм;
– термоусадочная трубка;
– два DVD привода;
– индивидуальная печатная плата;
– акриловый лист 5 мм.
Инструменты:
– паяльник;
– сверлильный станок;
– лобзик или мини-пила;
– наждачная бумага;
– кусачки;
– суперклей.
Шаг 1: корпус
Первым делом мы сделаем корпус для будущего станка. Акриловый лист отлично подходит для любого DIY-проекта. Его легко резать, гнуть, шлифовать, и при этом он достаточно прочный, чтобы служить основой для всей сборки.
Здесь есть готовые шаблоны (первый и второй), которые необходимо скачать, распечатать, а затем вырезать и наклеить на акриловый лист.

Рис.1
Затем нужно разрезать заготовку в соответствии с формой шаблона, используя лобзик или мини-пилу, чтобы получились детали как на рисунке 1. Пластиковое покрытие с акрила можно снять и все части корпуса отшлифовать наждачной бумагой, чтобы получить гладкую матовую поверхность.

Рис. 2

Рис. 3
Осталось только соединить все части вместе с помощью суперклея, как на рисунках 2 и 3. Корпус готов.
Шаг 2: трансформация приводов
DVD диски давно ушли со сцены, и приводы в большинстве своем похоронены в старых нерабочих системных блоках. Но творческий предприимчивый ум всегда найдет применение хорошим вещам уходящей эпохи!
Для настоящего проекта нам понадобится два пишущих привода. Один для оси X (вертикаль) и другой для оси Y (горизонталь).
С помощью отвертки нужно удалить все винты и отсоединить все разъемы и кабели, как показано на рисунках.

Рис. 4

Рис. 5
Затем нужно открыть держатель диска, открутить и отсоединить выдвижной механизм – в нём как раз располагается шаговый двигатель.

Рис. 6
Гибкую печатную плату двигателя нужно разрезать и припаять к ней кабель JST, как на рисунке 7. А другой конец кабеля нужно припаять к штыревому разъему и закрепить с помощью термоусадочной трубки, как на рисунках 8 и 9 (для этого трубку нужно нагреть, это можно сделать как зажигалкой, так и паяльником).
Рис. 7

Рис. 8

Рис. 9
Шаг 3: сборка механизма
Сначала нам нужно сделать отверстия для крепления раздвижного механизма, используя сверло 3 мм.

Рис. 10
Для придания устойчивости нашему сооружению, обязательно используем 6-миллиметровые подставки. Их нужно прикрепить с помощью клея к угловым отверстиям механизма (рисунок 11). Эти маленькие детали помогут снизить вибрацию и получить более высокую точность гравировки.

Рис. 11
Чтобы установить раздвижной механизм в основной корпус, используем винты M3x12 и закрепляем гайками с обратной стороны для более надежной фиксации.

Рис. 12
Теперь нам нужно вырезать два квадратика из акрила, размер первого – 3х3 см, второго – 9х9. Сначала с помощью клея устанавливаем первый квадратик (он будет выполнять роль нижней гравировальной платформы), а поверх него уже ставим второй. Для основной платформы лучше использовать металл, но акриловый лист тоже подойдёт.

Рис. 13

Рис. 14
По завершении сборки, можно отложить механизмы в сторону. Так как пришло время поработать с Arduino.
Шаг 4: электроника
В этом проекте используется специально разработанная печатная плата, которую можно заказать на JLCPCB или изготовить самостоятельно методом ЛУТ (лазерно-утюжная технология). Схема платы (локальная копия) и файл формата gerber (локальная копия) – это всё, что нужно для её разработки и изготовления.

Рис. 15
Получив плату, мы можем приступать к пайке. Процесс этот кропотливый, наконечник паяльника должен быть тонким и чистым, а рука – твердой.

Рис. 16

Рис. 17

Рис. 18

Рис. 19
Можно начать с пайки штыревых разъёмов, а затем перейти к остальным компонентам схемы, для удобства (смотрите рисунки 16, 17, 18 и 19). Когда транзистор, стабилизатор, конденсатор, клеммник и резисторы на месте, переходим к установке драйверов.

Рис. 20

Рис. 21

Рис. 22
В управлении шаговыми двигателями без специальных драйверов не обойтись. Популярный А4988 работает от напряжения 8-35 В и может обеспечить ток до 1 А на фазу без радиатора (и до 2 A с радиатором). Одним из основных параметров шаговых двигателей является количество шагов на один оборот 360°. Например, для двигателя DVD привода это 200 шагов на оборот, то есть 1 шаг равен 1.8°. Драйвер A4988 позволяет увеличить это значение за счёт возможности управления промежуточными шагами, он имеет пять режимов микрошага: 1(полный), 1/2, 1/4, 1/8 и 1/16.
В GRBL (библиотека данных для прошивки контроллера, мы с ней ещё разберемся) цифровые и аналоговые пины Arduino зарезервированы. Контакты STEP (шаг) для осей X и Y подключены к цифровым контактам 2 и 3 соответственно, а контакты DIR (направление) к 5 и 6 контактам.
Контакты VDD, отвечающие за питание драйверов, подключены к 5 V на Arduino. Сама же Arduino получает питание через USB-кабель.
Пины MS1, MS2 и MS3 предназначены для настройки микрошага.
Low Low Low – полный шаг
High Low Low – 1/2
Low High Low – 1/4
High High Low – 1/8
High High High – 1/16
Шаг 5: финальный монтаж
Теперь пришло время прикрепить лазерный модуль и плату к корпусу гравера. Для длительной работы лазера нам необходим радиатор (можно достать из старой материнской платы).

Рис. 23
С помощью суперклея крепим радиатор с лазером к ползунку оси X, а плату устанавливаем на задней части корпуса с помощью винтов M3, как на рисунках 24 и 25. После этого подключаем кабели JST к разъемам на драйверах шаговых двигателей.

Рис. 24

Рис. 25
Шаг 6: прошивка GRBL и программное обеспечение LaserGRBL
GRBL - это прошивка для плат Arduino, которая управляет шаговыми двигателями и, по сути, выполняет функцию контроллера. GRBL использует Gcode (язык программирования устройств с ЧПУ) в качестве входных и выходных сигналов через контакты Arduino.
Сначала прошивку необходимо скачать (локальная копия).
Открываем Arduino IDE (локальная копия) и следуем таким путём:
Sketch»Include Library» Add.Zip Library» файл grbl-master.zip.
Библиотека установлена. Теперь нам нужно загрузить скетч grbl (скетч - это единица кода, которая загружается в плату и выполняется на ней).
Ищем скетч из меню File»Examples»grbl» grblUpload
Далее выбираем нужную плату и порт, нажимаем на кнопку загрузки и идём дальше знакомиться с программным обеспечением.
LaserGRBL - это один из лучших стримеров GCode для DIY лазерного гравера.

Рис. 26
LaserGRBL может загружать и передавать GCode-путь на Аrduino, гравировать изображения, картинки и логотипы с помощью встроенного инструмента преобразования. Его нужно просто скачать (локальная копия) и установить на компьютер.
После успешной установки открываем LaserGRBL, выбираем правильный COM-порт и скорость передачи данных для соединения.
Теперь мы, наконец, можем загрузить изображение, которое хотим выгравировать. LaserGRBL поддерживает любой формат изображения, нужно только не ошибиться с размером (40x40 мм).
И настало время гравировки!

Мы желаем успехов каждому, кто возьмётся за воплощение этого проекта в реальность. Творите, экспериментируйте, добавляйте в сборку что-то своё. Полученным результатом вы всегда можете поделиться с нами.
И пусть ваш гравер прослужит вам долго!
Arduino воплощает в реальность
Каждый из нас построил за жизнь десяток-другой стереотипных конструкторов, а полки некоторых давно забиты старыми роботами, запчастями от лего и моделями машин. Представьте, что их можно оживить! Оснастить динамиками, моторчиками для самостоятельного движения и светодиодами. А можно соорудить собственный проект: умный дом, автоматический полив цветов или кормушку для домашних животных. Все это осуществимо с электронным набором Arduino.

На нашем ютуб канале есть фильм под названием “Maker”, в котором главные герои создают своими руками удивительные вещи. С набором Arduino вы прочувствуете в живую, что значит быть творцом.
Arduino — это платформа для создания электронных устройств, гаджетов и любых автоматических систем, список которых ограничивается только нашей фантазией.
Её создатель, программист Массимо Банци, в 2002 был принят на работу преподавателем в Миланский институт дизайна и проектирования. Для того, чтобы проводить лабораторные работы со своими учениками, ему требовалась электронная плата, которую можно было бы легко программировать и внедрять в интерактивные проекты студентов. В то время такие платформы только набирали популярность, их цена была чрезвычайно высокой — 100$. Поэтому преподаватель купил дешевые комплектующие и соединил их на одной плате, тем самым снизив цену платформы на 70$. Это сделало ее доступной для любого студента. Массимо Банци назвал плату в честь своего бара, которым он ранее владел — Arduino. Продажа платы началась в 2005 году, она сразу заслужила дикую популярность — 250 000 комплектов было продано только за первый месяц производства.

Для простоты понимания, Arduino можно сравнить с материнской платой. Она состоит из процессора и множества подключенных к нему периферических устройств: дисплея, дисководов, жестких дисков и так далее. Arduino имеет схожее строение, только вместо процессора — микроконтроллер — главный элемент платформы. Именно он выполняет все основные задачи Arduino: производит вычисления, выдаёт и измеряет напряжение, запоминает данные. Как следствие, микроконтроллер может подавать сигнал на светодиоды, динамики, двигатели и датчики. На плате он выглядит как маленькая многоногая пластинка с названием модели, но на деле, большая часть процессов приходится именно на неё.

При установке на платформу дополнительных модулей,таких как Wi-Fi и GSM, возможности Arduino значительно расширяются. С их помощью платформа может автоматически звонить по сотовой связи, писать СМС, размещать информацию и анализировать данные на сервере, а это всего лишь два модуля! Представьте, на что способен этот малыш, если вы оснастите его тысячами других дополнений.

Разработчики, которые занимаются постройкой проектов на основе Arduino, сравнивают ее с конструктором, который можно приспособить под любые потребности человека. Так ли это в действительности?
Для того что бы любая платформа работала, ее нужно запрограммировать и подключить к компьютеру. Затем вы должны зайти в программу и написать код.
Написание кода является важнейшей частью работы с любой вычислительной техникой. Осуществляется это в программной среде (среде разработки), выбранного вами устройства. Плата Arduino основана на языке Java и программируется в среде разработки Arduino IDE. Подключая её через USB порт к компьютеру, вы «пишете» задачу, подобную загоранию лампочки или включению моторчика, после чего микроконтроллер запоминает ее и воспроизводит по мере надобности.
Поскольку все модули и датчики настроены (запрограммированы) индивидуально под ту, или иную платформу с учетом всех её особенностей, подключить к Arduino можно далеко не все периферические устройства, а только совместимые. При этом торговая марка предоставляет пользователям настолько большой спектр дополнительных компонентов, что вы можете найти абсолютно любой датчик или модуль для своей идеи. Все они продаются в диапазоне от 20 до 500 рублей.
Важной частью любой программируемой платы являются порты (пины) для подключения модулей и датчиков. Порты делятся по типу принимаемого сигнала на цифровые и аналоговые. Чтобы понять, какое устройство куда подключать, для каждой платы Arduino есть схемы распиновки, разобраться в которых несложно даже начинающему пользователю.
Разделение периферических устройств на два типа зависит от выполняемой ими задачи. Чаще всего модули и датчики на плате считывают цифровой сигнал, он более четкий и при его дублировании оригинал ничем не отличается от копии. При помощи цифрового сигнала устройства успешно передают звук, изображение, любые изменения в атмосфере. Аналоговый сигнал принимают модули обрабатывающие и запоминающие числовые и текстовые значения. При их передаче сигнал не теряется, потому как выражен четкими символами.
Важно помнить, что Arduino — это общее название платформы, которое включает в себя целый модельный ряд. Самые популярные модели: Arduino Uno, Arduino Mega, Arduino Nano. Отличие плат друг от друга определяется мощностью и функциями микроконтроллера, величиной платы и количеством пинов. Для каждого проекта опытные ардуинщики выбирают отдельную плату в зависимости от ее функций и параметров.

Все платы питаются от заряда 5 V. Вы можете запитать Arduino от зарядки для телефона или внешнего аккумулятора, а если на помощь придёт преобразователь напряжения, то для питания сгодится и одна пальчиковая батарейка.

Для тех, кто хочет попасть в удивительный мир программирования и разработок, нужно сказать, что Arduino — не самая совершенная платформа из всех существующих. Опытные мастера причисляют ей не один недостаток. Однако Arduino — это о простоте и доступности, идеальный вариант для новичка в электротехнике. Задумав проект, вы с легкостью можете осуществить его. Но если вы захотите продавать свой продукт и вам будет важна высокая производительность, то Arduino — не лучшая платформа для разработки. Такие факторы как эффективное написание кода или объем памяти среды разработки могут стать решающими. Опытные производители поступают следующим образом: они моделируют свой проект на Arduino, а после выпускают продукт уже на специально подобранной плате, которая удовлетворяет все их потребности.
Arduino действительно способна воплотить в реальность любую вашу идею. И речь идет не только о бытовых электроприборах. При желании вы можете соорудить пневматическое оружие, бортовой компьютер, электронную сигарету или металлоискатель. Главное фантазия и желание создать что-то своими руками. Доказывают это и тысячи готовых проектов от счастливых обладателей Arduino.
Ниже представлено видео с ютуб-канала AlexGuver.
Brunel Hand 2.0 - будущее кистевых протезов

Brunel Hand 2.0, разработка лаборатории Open Bionics – продвинутая, лёгкая и точная роботизированная рука, предназначенная для исследователей. Низкая стоимость и открытый исходный код делают эту кисть с шарнирными пальцами важным шагом на пути к революции в робототехнике.
Инженеры, учёные и университеты по всему миру используют Brunel Hand. Она обладает девятью степенями свободы, четырьмя режимами запуска, а также может быть перепрограммирована с использованием среды Arduino.
Brunel Hand 2.0 совместима с манипуляторами робота и идеально подходит для тех, кто нуждается в механической кисти для своего проекта, или для многофункционального использования с ботами-гуманоидами. Она является идеальным полем для исследований, связанных с протезированием и взаимодействием человека и машины.
Параметры:
- 9 степеней свободы
- 4 режима запуска
- Открытый исходный код согласно международной лицензии CC Attribution-Sharealike 4.0
- Совместима с ИСР Arduino
- Возможность программирования через USB
- Мощный встроенный контроллер
- Возможность следить за работой приводов в реальном времени
- Лёгкий вес (идеально подходит для мелкомасштабной погрузки)
- Подключение с использованием USB и I2C, а также проводов коммутации
- Полностью управляемый светодиодный RGB-индикатор
- Встроенный инерциальный модуль на 9 осей
- Механически совместимые фаланги пальцев
- Прочный дизайн, защищающий от поломки
- Цепкая ладонь и подушечки пальцев с полиуретановым покрытием для эффективного захвата
Технические характеристики:
- Вес 332 г.
- Размер 198 x 127 x 55 мм
- Рабочее напряжение: 12V
- Материалы: полилактид, ТПУ и уретан
Загрузки:
- Техническое описание ПП Chestnut
- Библиотека прошивок Fingerlib (.zip)
- Руководство пользователя Beetroot V1
- Дополнительные обучающие ссылки











