")

Сегодня мы продолжаем процесс создания полезного в быту робота-мойщика полов. В предыдущей статье мы собрали каркас и начали подключение по схеме, разработанной специально для этого робота. Во второй части мы затронем сборку устройства, кодирование и настройку приложения для его использования.
Шаг 1: сборка робота

Рисунок 1. Присоединение компонентов
Мы будем использовать несколько стяжек, чтобы поместить водяной насос на основу робота. Для бутылки с водой нужно просверлить отверстие, через которое протягивается впускная труба. Затем приклеиваем бутылку к фанере (рекомендуем использовать термоклей). Клапан управления потоком присоединяем спереди. Выпускная труба должна располагаться так, чтобы вода попадала прямо на швабру (смотри рисунок 2).

Рисунок 2. Итоговый механизм робота без швабры и питания
Для питания будем использовать три 18650 литий-ионных аккумулятора по 3000 мАч. Это лучший вариант для питания нашего робота, поскольку литиевые батареи имеют высокую плотность энергии и занимают очень мало места. Они соединены последовательно, поэтому получаем примерно 12 В (рисунок 3).
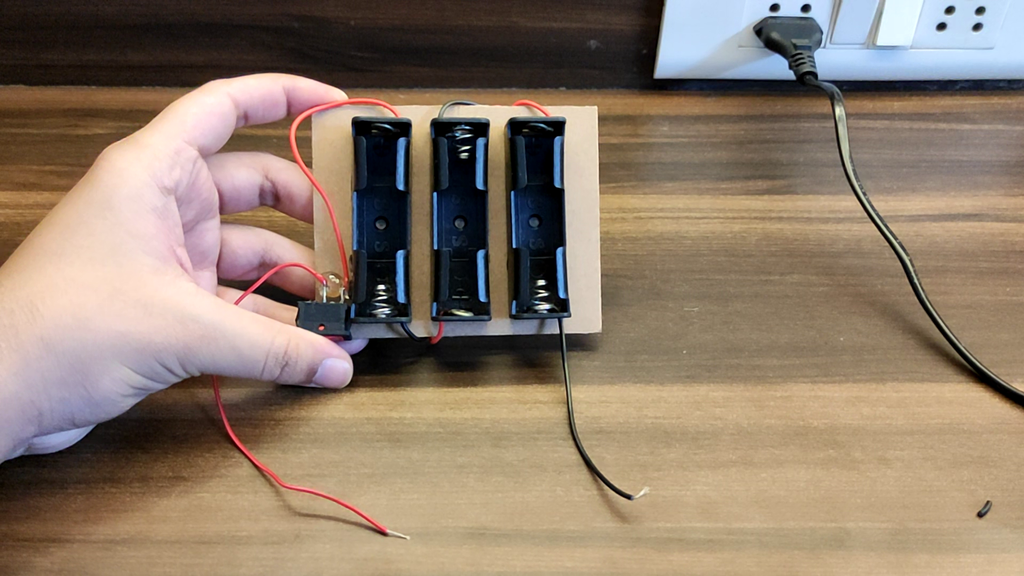
Рисунок 3. Держатели для литий-ионных аккумуляторов
Рекомендуем использовать три одиночных держателя ячеек. С помощью термоклея приклейте их на кусок жёсткого картона и соедините последовательно. Далее подключаем кнопку с фиксацией для включения/выключения робота.
Подключите питание к основной плате. Важно: не разряжайте батареи слишком сильно, поскольку мы не используем систему управления батареями или какую-либо другую защиту. Соблюдайте технику безопасности, чтобы не допустить возникновения короткого замыкания в цепочке.
Чтобы робот работал дольше, вы можете увеличить мощность, добавив еще одну аккумуляторную систему параллельно.

Рисунок 4. Установка литий-ионных аккумуляторов.
Прикрепите швабру к роботу через отверстие, которое мы просверлили ранее. Используйте для этого термоклей. Поместите сливную трубку на швабру так, чтобы вода попадала прямо на неё (смотри рисунок 5).

Рисунок 5. Присоединение швабры и сливной трубки под основу робота
Шаг 2: загружаем код
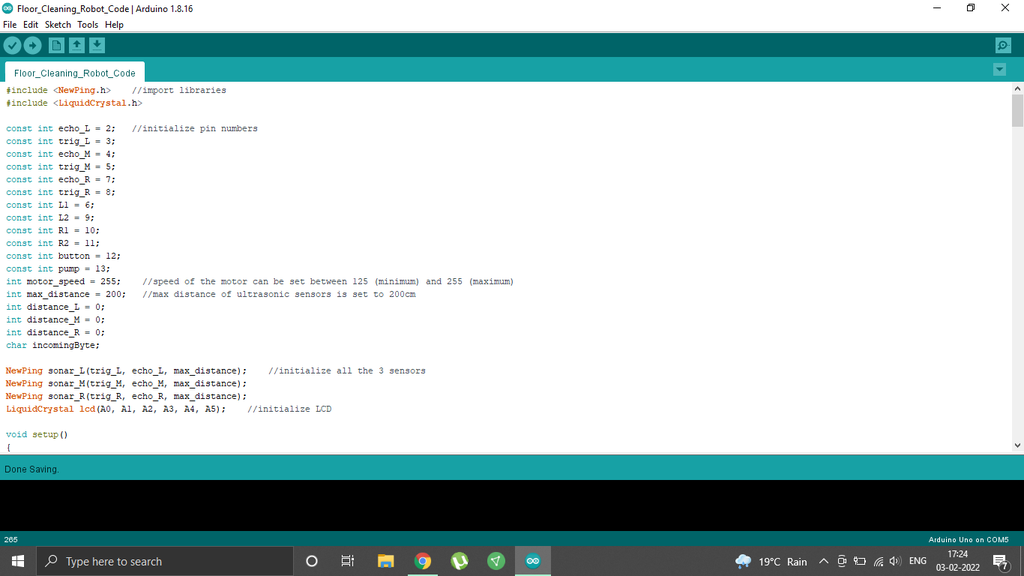
Рисунок 6. Код робота-мойщика
Код для этого проекта можно загрузить по следующей ссылке. Вам нужно будет установить две библиотеки — одну для ультразвуковых датчиков, другую для ЖК-дисплея. Старайтесь внимательно следовать дальнейшим шагам в инструкции, потому что при неверных настройках кода и приложения робот не будет работать должным образом, и вам придётся менять установки снова.
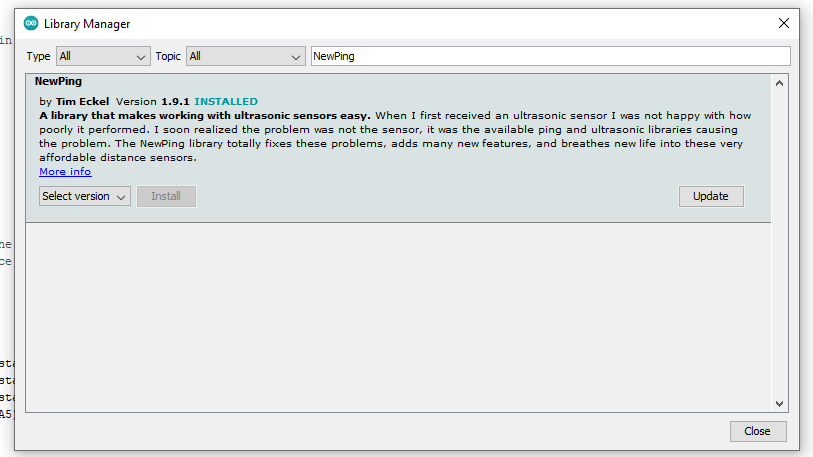
Рисунок 7. Библиотека
- Перейдите в «Sketch» > «Включить библиотеку» > «Управление библиотеками»;
- Под строкой поиска введите «NewPing»;
- Установите библиотеку «NewPing» Тима Экеля;
- Аналогичным образом найдите «LiquidCrystal»;
- Установите библиотеку «LiquidCrystal» от Arduino (в более новых версиях IDE она может быть уже установлена).

Рисунок 8. Библиотека
Чтобы загрузить код, нужно отсоединить Arduino из схемы подключения: при загрузке кода к проводам Rx и Tx Arduino ничего не должно быть подключено, а здесь у нас подключен модуль bluetooth. Поэтому либо удалите провода Rx и Tx из модуля Bluetooth перед загрузкой, либо отсоедините Arduino. Не забудьте вернуть её на место после завершения этого шага.

Рисунок 9. Временное отсоединение платы Arduino
Шаг 3: настройка приложения

Рисунок 10. Приложение для управления робота-мойщика
Для управления роботом через телефон мы будем использовать приложение Bluetooth Serial Controller. Загрузите его из Play Store. Теперь нам нужно настроить его так, чтобы он работал с нашим роботом.
- перейдите в «Настройки», прокрутите вниз;
- в разделе «Ориентация» выберите «Портрет»;
- можете включить белый фон, если хотите (необязательно);
- перейдите в «Кнопка» > «Видимость»
- Нам нужны кнопки 2, 5, 6, 7, 10, поэтому оставьте их отмеченными и снимите флажки с других .
- перейдите к размеру кнопки и установите размер портрета на 100 .
- Если вы вернетесь назад, вы увидите 5 кнопок на месте. Теперь наша задача — дать им имена;
- Выберите «Кнопка» > «Имя»;
- Назовите кнопку 2 как «Вперёд», кнопку 5 «Влево», кнопку 6 «Насос », кнопку 7 «Вправо» и кнопку 10 «Назад»;
- Затем перейдите в «Кнопка» > «Команды»;

Рисунок 11. Настройка кнопок
Ниже приведены команды (с учётом регистра ):
- Кнопка 2 (вперед): « F»
- Кнопка 5 (слева): «L»
- Кнопка 6 (насос ВКЛ): «P»
- Кнопка 7 (справа): «R»
- Кнопка 10 (Назад): «В»
Нам также нужно настроить Stop Commands. Это команды, которые отправляются, когда кнопка не нажата. Если мы не добавим команды остановки и не нажмём, например, кнопку «Вперёд», робот продолжит движение вперёд и не остановится даже после того, как мы отпустим кнопку.
В разделе Button > Command > Stop Command отметьте Button 2, 5, 6, 7, 10.
Ниже приведены команды остановки (с учётом регистра):
- Кнопка 2: «С»
- Кнопка 5: «С»
- Кнопка 6: «p» (для выключения насоса)
- Кнопка 7: «С»
- Кнопка 10: «С»
Сделайте кнопки скорости 13, 14, 15 видимыми. Затем назовите их как Low, Medium и High соответственно. Наконец, установите соответствующие команды:
- Низкая скорость: «1»
- Средняя скорость: «2»
- Максимальная скорость: «3»
Вы можете поэкспериментировать с названиями кнопок и подстроить их под себя. Но мы рекомендуем вам взять за основу нашу настройку, чтобы избежать путаницы на первых этапах использования робота.
Шаг 4: протестируйте робота

Рисунок 12. Тестирование робота-мойщика и его приложения
Включите робота и проверьте, отображается ли на ЖК-дисплее приветственное сообщение. Если это не так, попробуйте настроить потенциометр триммера или перепроверьте соединения.
На телефоне включите Bluetooth и выполните поиск устройств. Соединитесь с HC-05. Пароль будет «0000» или «1234». Теперь проверьте, движется ли робот при нажатии кнопок на вашем телефоне. Если он не двигается, проверьте, отображается ли команда на ЖК-дисплее. Если всё отображается правильно, но движения нет, это означает, что Arduino правильно получает команду. Тогда это может быть проблема с соединениями драйвера двигателя.
Если робот не двигается и ничего не отображает на ЖК-дисплее, проверьте, правильно ли подключен ваш модуль Bluetooth. Провод Tx на модуле Bluetooth должен идти к Rx на Arduino и наоборот. Также проверьте, правильно ли вы установили команды в приложении. Если ни тот, ни другой совет не помогли избавиться от проблемы, вернитесь к самому первому шагу и еще раз проверьте все подключения по схеме из первой части инструкции.

Ваш робот-помощник готов! Теперь вы можете спокойно смотреть телевизор или играть в любимые видеоигры вместо того, чтобы тратить свои выходные на энергозатратный процесс уборки. Главное — вовремя спрятать робота, когда к вам придут гости, иначе придётся собирать таких же домашних роботов для каждого. Делитесь с нами вашими устройствами в телеграмм-канале.



![Preservation — драматичный фотопроект Блейка Литла [18+]](https://insighthub.ru/images/mnwallimages/1280x720/media/k2/items/cache/37a06e4a72d6cb27621f1ed829bbee81_XL.jpg)




