")

Как же тяжело выполнить все поставленные задачи в срок и перестать говорить себе фразу: «У меня же не сто рук, а всего лишь две!». Сегодня мы расскажем о возможности собрать настоящего робота-помощника, потенциал которого будет зависеть от широты вашей фантазии. Мы рассмотрам лёгкие команды, такие как сжатие, махи, сгибание.
Роботизированная рука — способ облегчить задачу себе или людям с ограниченными возможностями. В этом гайде мы рассмотрим создание робота с элементарным функционалом, но его модернизация зависит только от вас — не бойтесь экспериментировать. Уверены, если вы возьмтесь за модернизацию, сможете добиться гораздо больших высот! Пособие будет состоять из двух частей: во-первых, подготовка материалов, работа с сервоприводами, во-вторых, полная сборка руки, программный код и использование.
Что вам понадобится?

- филамент (нить) для 3D-печати (чёрно-белый PLA);
- 8 сервоприводов SG90;
- леска;
- тонкий эластичный шнур;
- 4 пружины;
- термоусадочная трубка;
- запасной провод;
- плетёный нейлоновый рукав (можно заменить стяжками);
- Arduino uno;
- аккумулятор (9 В или Lipo);
- 3D-принтер;
- паяльник
- отвёртка;
- суперклей или эпоксидная смола;
- дрель и плоскогубцы для очистки опорной конструкции;
- инструмент для зачистки проводов/кусачки.
Шаг 1: 3D-печать
Рисунок 1. 3D-модель
3D-принтер не всегда может быть под рукой, но в своём инстаграме (https://www.instagram.com/in_hub/) мы разыграем один принтер, когда отметка подписчиков достигнет 3000! Скорее переходите по ссылке и подписывйтесь, возможно именно вы станете счастливым обладателем нового устройства для 3D-экспериментов.
Файлы Fusion 360 можно найти здесь: http://a360.co/2ufYJJV
Чтобы напечатать руку в 3D, вам необходимо загрузить файл .f3d по ссылке выше, открыть его в программе Fusion 360 и экспортировать отдельные части в виде файлов .stl в выбранное вами программное обеспечение для 3D-печати.
Несколько советов:
Кончики пальцев предназначены для печати на 3D-принтере с двойной экструзией, поскольку чёрные кончики слишком тонкие, чтобы их можно было печатать самостоятельно. Все остальные части будут печататься одинаково как на двойном, так и на одиночном экструзионном принтере.
Шаг 2: сервопривод с непрерывным вращением

Рисунок 2. Сервопривод с непрерывным вращением
Вращение сервоприводов ограничено из-за переменных резисторов (устройств, которые имеют переменное сопротивление, при их вращении можно считывать изменения и вычислять угол поворота), которые не могут вращаться более чем на 180 градусов.

Рисунок 3. Пластиковая заглушка
Чтобы обойти это ограничение, откройте сервопривод и отрежьте пластиковую заглушку на самой верхней шестерне (смотри рисунки 2 и 3).
Затем просверлите отверстие в центре, чтобы шестерня свободно вращалась и не сталкивалась с D-образным креплением потенциометра (рисунок 4).

Рисунок 4. Сверление центра
Теперь шестерня может непрерывно вращаться, в то время как переменный резистор двигаться не будет. Соберите сервопривод и протестируйте его с помощью приведённого ниже кода. Сделайте два таких сервопривода.
Код:
Важно: при модификации сервопривода убедитесь, что вы повернули резистор в среднее положение. Если потенциометр будет повернут к любому из концов, он будет показывать угол 180 или 0, и код не будет работать.
Шаг 3: компактные двигатели постоянного тока 2-в-1

Рисунок 5. Разобранный сервопривод
В этом шаге мы расскажем о том, как разместить два сервопривода так, чтобы их не деформировать. Единственным изменением, которое мы совершим, будет увеличение длины проводов, соединяющих двигатель, резистор и микросхему.

Рисунок 6. Отрезание деталей
Откройте сервопривод и отрежьте резистор и чип (пока отложите их).
Из трёх синих пластиковых деталей корпуса вырежьте две нижние. Важно убедиться, что выемка, с помощью которой держится ось, не срезана (рисунок 7).

Рисунок 7. Сравнение срезов выемки (слева — удачный пример, справа — неудачный)
Отрежьте пластиковую заглушку на самой верхней шестерне — это позволит сервоприводу непрерывно вращаться. Соберите корпус, как показано на рисунке 8. Повторите действия со вторым сервоприводом.

Рисунок 8. Сборка сервопривода
В данный момент шестерни не имеют оси, на которой можно было бы вращаться. Найдите подходящий по размеру стержень (8-8,5 мм).

Рисунок 9. Ось для вращения
Используя эпоксидную смолу, склейте сервоприводы вместе (рисунок 10).
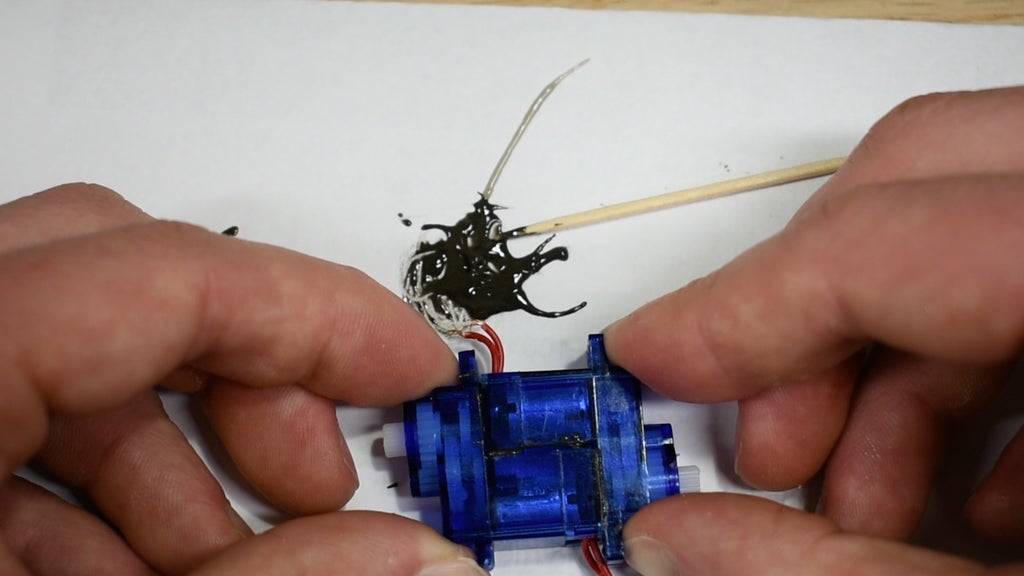
Рисунок 10. Склейка
Припаиваем удлинители к проводам от двигателей постоянного тока.
Чтобы проверить их работу, используйте 3,7-вольтовый Lipo, подключенный к одному из двигателей. Он должен непрерывно вращаться в обоих направлениях (достигается за счёт перестановки батареи).
На последующих этапах сохранённые нами резисторы будут помещены в суставы пальцев для получения показаний поворота (от 0 до 90 градусов). Также их можно использовать при подключении к Arduino.

Рисунок 11. Конструкция сустава большого пальца
Шаг 4: оставшиеся сервоприводы

Рисунок 12. Потенциометр
Три сервопривода оставляем без изменений: один будет использоваться для вращения большого пальца, а два других для движения запястья влево/вправо и вверх/вниз. От четвёртого сервопривода нам нужен только чёрный резистор, остальное можно оставить на запчасти.
На этом первая часть нашего гайда подходит к концу, но это не повод отложить работу в долгий ящик. Впереди нас ждёт пособие по сборке самой руки, а также инструкция о том, как правильно её запрограммиовать. Заинтригованы? Скорее переходите по ссылке и продолжайте экспериментировать!








