")
Основное меню

Wowcube — это цифровая игрушка для снятия стресса, которая улучшает когнитивные функции, моторику и трёхмерное мышление. На его гранях размещены 24 OLED-экрана. Они запускают множество пользовательских приложений, требующих физического воздействия: встряхиваний, поворотов, касаний и наклонов сторон куба. Он появился на выставке CES три года назад и привлёк к себе много внимания. Сейчас разработка гаджета закончена, и в ближайшие полгода необычный многогранник появится на страницах интернет-магазинов. Этот продукт является лишь одной из многих высокотехнологичных роботизированных игрушек, разработанных компанией Cubios Inc.
Виртуальный геймплей ведётся в трёх измерениях, поэтому используется вся поверхность изделия. Это активизирует пространственное мышление пользователя. Запатентованные магнитные соединители позволяют модулям поддерживать идеальный электрический контакт и бесперебойный поток данных, независимо от того, как вращается многогранник.

Рисунок 1. Интерфейс куба
Механизм выглядит как кубик Рубика 4х4 до тех пор, пока вы не встряхнёте его: экраны оживают и превращают обычное развлечение в инновационный девайс. Разработка является одной из самых уникальных консолей за последнее время из-за сложных механики, электроники и софта.
В основе фиджета лежит простой пластиковый блок и 8 модулей, которые представляют собой отдельную вычислительную единицу с процессором, драйверами, аккумулятором и OLED-экранами. Они взаимодействуют друг с другом с помощью шарикоподшипников.

Рисунок 2. Основа гаджета
В базовую комплектацию входят: подставка, кабель USB-C, зарядное устройство 5 В, 3 А, прочный футляр для переноски, дополнительные силиконовые бамперы и купон магазина на будущие покупки. Несмотря на наличие бамперов, оборудование кажется прочным, поэтому можно с уверенностью давать гаджет в руки ребёнку, не беспокоясь за то, что он может его сломать. Также разработчики организовали продажу сменных компонентов и других деталей для самостоятельного ремонта.
Софт и пользовательский интерфейс
Девайс работает на собственной уникальной операционной системе Cubios, специально разработанной для плавного взаимодействия между модулями. К использованию консоли нужно немного привыкнуть из-за совершенно уникального пользовательского скина. Экраны не чувствительны к прикосновениям, они используют датчик движения.
Чтобы включить геометрический фиджет, нужно покрутить или встряхнуть его. Отключить будет немного сложнее: вам нужно трижды потрясти механизм, чтобы вернуться в главное меню, затем повернуть и наклонить левую грань, пока не будет выделен значок питания, а после этого дважды тапнуть на поверхность. Главное - ничего не перепутать, иначе можно случайно войти в социальную сеть и застрять там еще на несколько часов.

Рисунок 3. Меню куба
В главном меню вы можете выбрать игры, поворачивая куб и наклоняя основания устройства. Чтобы войти в выбранную программу, дважды коснитесь блока, чтобы она загрузилась. Не забудьте скачать приложение Wowcube, которое поможет подключить смартфон через Bluetooth для удалённого управления. Это позволит устанавливать новые веб-приложения, менять настройки и многое другое.

Рисунок 4. Основное меню
Игровой процесс
При запуске в Wowcube App Store вы можете ознакомиться со всеми доступными играми, которые можно загрузить. Сейчас некоторые из них представляют собой демоверсии известных аркад с одним и тем же принципом: вариации «Три в ряд», пазлы, простые головоломки, гонки и классику — кубик Рубика. Все они были разработаны с учётом условий отображения на 24 экранах и использования ограниченного набора взаимодействий.

Рисунок 5. Игры
Если вам нравятся головоломки и казуальные игры, то оторваться от фиджета будет просто невозможно - первые тестировщики были способны разрядить аккумулятор в один присест — за 5 часов.
Другие возможности
Стоит напомнить, что над Вау-кубом продолжают работать и совершенствовать функционал. Большинство веб-приложений были созданы для демонстрации возможностей гаджета и нуждаются в доработке.
Приложение Timer служит показательным примером того, как тяжело использовать некоторые функции с оригинальным скином разработки. Каждая грань отвечает за разное количество времени: есть сторона на десять минут, 15 секунд, 1 минуту и т. д. Нужно выполнить сложный алгоритм перемещения для того, чтобы установить точное время, однако взять смарт-часы и сказать: «Эй, Сири, поставь таймер на X минут», гораздо проще.

Рисунок 6. Приложение Таймер
В приложении на смартфоне есть галерея оригинальных заставок, которые включаются, когда вы откладываете геометрический девайс, и он переходит в автономный режим работы.
Есть приложение Widgets, которое покрывает каждый экран информацией, такой как курс акций, погода, уведомления и фотографии. К сожалению, пока что блоки обновляются только при подключении фиджета к телефону по Bluetooth, но создатели намерены подумать над внедрением WI-FI.

Рисунок 7. Оригинальные рисунки
При цене 250 $ только время покажет, сможет ли Wowcube выйти в массы и стать фаворитом у любителей гаджетов. Возможно, более низкая стоимость сделала бы его популярной настольной игрушкой, но сложный интерфейс даёт нам понять, что у разработчиков большие планы на данный продукт.
Создатели постарались сделать компоненты куба простыми для того, чтобы его было легко отремонтировать в случае неисправностей, что является несомненным плюсом. На своём сайте команда заявляет о том, что хочет привлечь талантливых программистов, которые будут скачивать специализированные приложения и изучать скин девайса, чтобы вносить свежие идеи в будущие поколения Wowcube. SDK (набор средств разработки ПО) включает эмулятор, основанный на бесплатном программном обеспечении с открытым исходным кодом Pawn и интегрированной средой кода Visual Studio.
Развлекательная система поможет детям в развитии их когнитивных навыков, таких как логическое и критическое мышление. А вы бы купили такой инновационный гаджет для своего ребёнка или предпочли более традиционные варианты? Делитесь своими мыслями в нашем сообществе ВК — там много единомышленников!

Сегодня мы продолжаем процесс создания полезного в быту робота-мойщика полов. В предыдущей статье мы собрали каркас и начали подключение по схеме, разработанной специально для этого робота. Во второй части мы затронем сборку устройства, кодирование и настройку приложения для его использования.
Шаг 1: сборка робота

Рисунок 1. Присоединение компонентов
Мы будем использовать несколько стяжек, чтобы поместить водяной насос на основу робота. Для бутылки с водой нужно просверлить отверстие, через которое протягивается впускная труба. Затем приклеиваем бутылку к фанере (рекомендуем использовать термоклей). Клапан управления потоком присоединяем спереди. Выпускная труба должна располагаться так, чтобы вода попадала прямо на швабру (смотри рисунок 2).

Рисунок 2. Итоговый механизм робота без швабры и питания
Для питания будем использовать три 18650 литий-ионных аккумулятора по 3000 мАч. Это лучший вариант для питания нашего робота, поскольку литиевые батареи имеют высокую плотность энергии и занимают очень мало места. Они соединены последовательно, поэтому получаем примерно 12 В (рисунок 3).
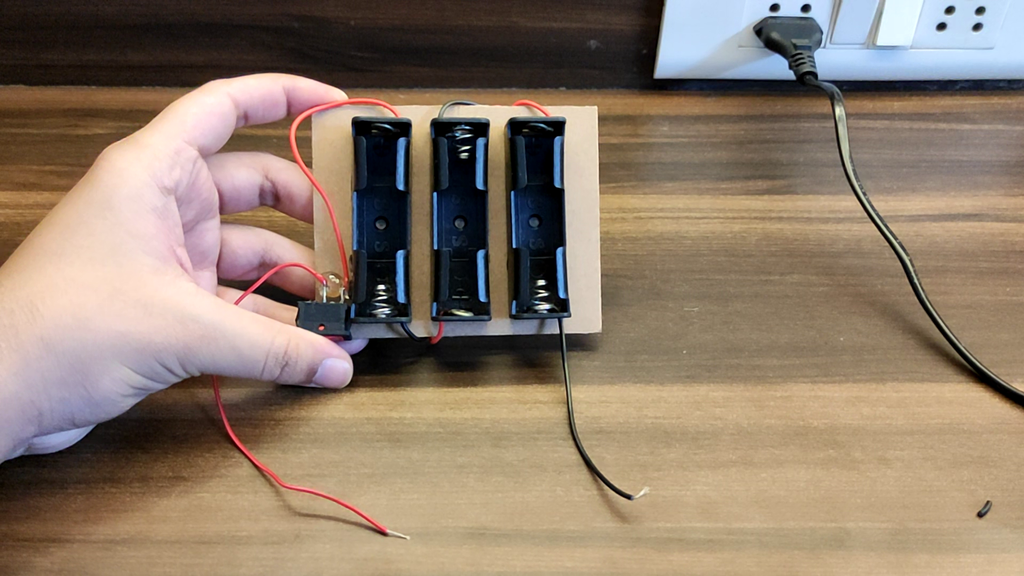
Рисунок 3. Держатели для литий-ионных аккумуляторов
Рекомендуем использовать три одиночных держателя ячеек. С помощью термоклея приклейте их на кусок жёсткого картона и соедините последовательно. Далее подключаем кнопку с фиксацией для включения/выключения робота.
Подключите питание к основной плате. Важно: не разряжайте батареи слишком сильно, поскольку мы не используем систему управления батареями или какую-либо другую защиту. Соблюдайте технику безопасности, чтобы не допустить возникновения короткого замыкания в цепочке.
Чтобы робот работал дольше, вы можете увеличить мощность, добавив еще одну аккумуляторную систему параллельно.

Рисунок 4. Установка литий-ионных аккумуляторов.
Прикрепите швабру к роботу через отверстие, которое мы просверлили ранее. Используйте для этого термоклей. Поместите сливную трубку на швабру так, чтобы вода попадала прямо на неё (смотри рисунок 5).

Рисунок 5. Присоединение швабры и сливной трубки под основу робота
Шаг 2: загружаем код
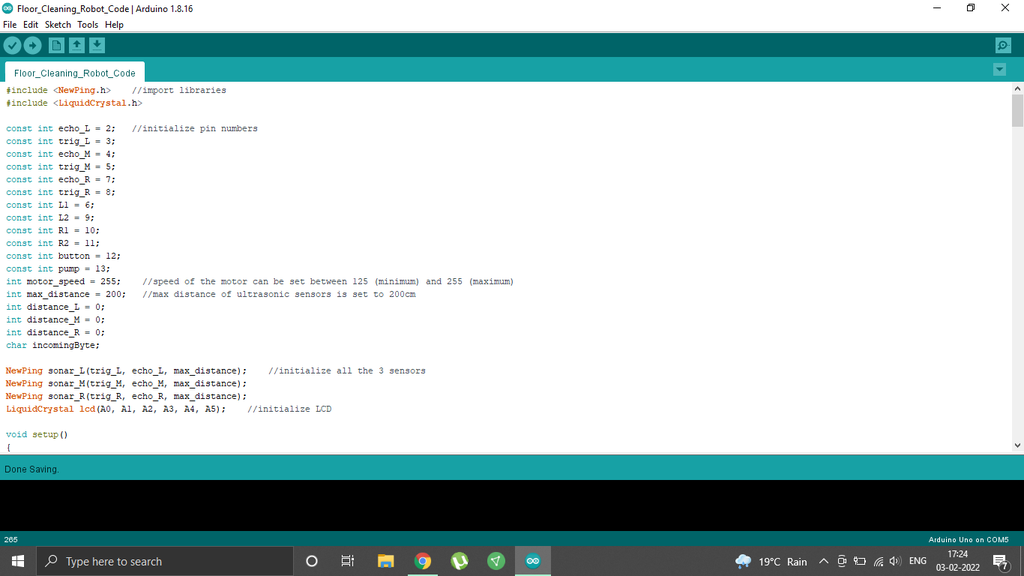
Рисунок 6. Код робота-мойщика
Код для этого проекта можно загрузить по следующей ссылке. Вам нужно будет установить две библиотеки — одну для ультразвуковых датчиков, другую для ЖК-дисплея. Старайтесь внимательно следовать дальнейшим шагам в инструкции, потому что при неверных настройках кода и приложения робот не будет работать должным образом, и вам придётся менять установки снова.
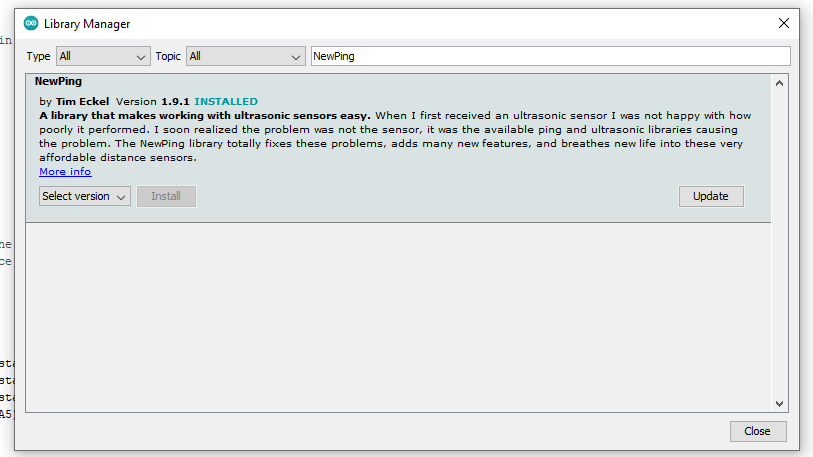
Рисунок 7. Библиотека
- Перейдите в «Sketch» > «Включить библиотеку» > «Управление библиотеками»;
- Под строкой поиска введите «NewPing»;
- Установите библиотеку «NewPing» Тима Экеля;
- Аналогичным образом найдите «LiquidCrystal»;
- Установите библиотеку «LiquidCrystal» от Arduino (в более новых версиях IDE она может быть уже установлена).

Рисунок 8. Библиотека
Чтобы загрузить код, нужно отсоединить Arduino из схемы подключения: при загрузке кода к проводам Rx и Tx Arduino ничего не должно быть подключено, а здесь у нас подключен модуль bluetooth. Поэтому либо удалите провода Rx и Tx из модуля Bluetooth перед загрузкой, либо отсоедините Arduino. Не забудьте вернуть её на место после завершения этого шага.

Рисунок 9. Временное отсоединение платы Arduino
Шаг 3: настройка приложения

Рисунок 10. Приложение для управления робота-мойщика
Для управления роботом через телефон мы будем использовать приложение Bluetooth Serial Controller. Загрузите его из Play Store. Теперь нам нужно настроить его так, чтобы он работал с нашим роботом.
- перейдите в «Настройки», прокрутите вниз;
- в разделе «Ориентация» выберите «Портрет»;
- можете включить белый фон, если хотите (необязательно);
- перейдите в «Кнопка» > «Видимость»
- Нам нужны кнопки 2, 5, 6, 7, 10, поэтому оставьте их отмеченными и снимите флажки с других .
- перейдите к размеру кнопки и установите размер портрета на 100 .
- Если вы вернетесь назад, вы увидите 5 кнопок на месте. Теперь наша задача — дать им имена;
- Выберите «Кнопка» > «Имя»;
- Назовите кнопку 2 как «Вперёд», кнопку 5 «Влево», кнопку 6 «Насос », кнопку 7 «Вправо» и кнопку 10 «Назад»;
- Затем перейдите в «Кнопка» > «Команды»;

Рисунок 11. Настройка кнопок
Ниже приведены команды (с учётом регистра ):
- Кнопка 2 (вперед): « F»
- Кнопка 5 (слева): «L»
- Кнопка 6 (насос ВКЛ): «P»
- Кнопка 7 (справа): «R»
- Кнопка 10 (Назад): «В»
Нам также нужно настроить Stop Commands. Это команды, которые отправляются, когда кнопка не нажата. Если мы не добавим команды остановки и не нажмём, например, кнопку «Вперёд», робот продолжит движение вперёд и не остановится даже после того, как мы отпустим кнопку.
В разделе Button > Command > Stop Command отметьте Button 2, 5, 6, 7, 10.
Ниже приведены команды остановки (с учётом регистра):
- Кнопка 2: «С»
- Кнопка 5: «С»
- Кнопка 6: «p» (для выключения насоса)
- Кнопка 7: «С»
- Кнопка 10: «С»
Сделайте кнопки скорости 13, 14, 15 видимыми. Затем назовите их как Low, Medium и High соответственно. Наконец, установите соответствующие команды:
- Низкая скорость: «1»
- Средняя скорость: «2»
- Максимальная скорость: «3»
Вы можете поэкспериментировать с названиями кнопок и подстроить их под себя. Но мы рекомендуем вам взять за основу нашу настройку, чтобы избежать путаницы на первых этапах использования робота.
Шаг 4: протестируйте робота

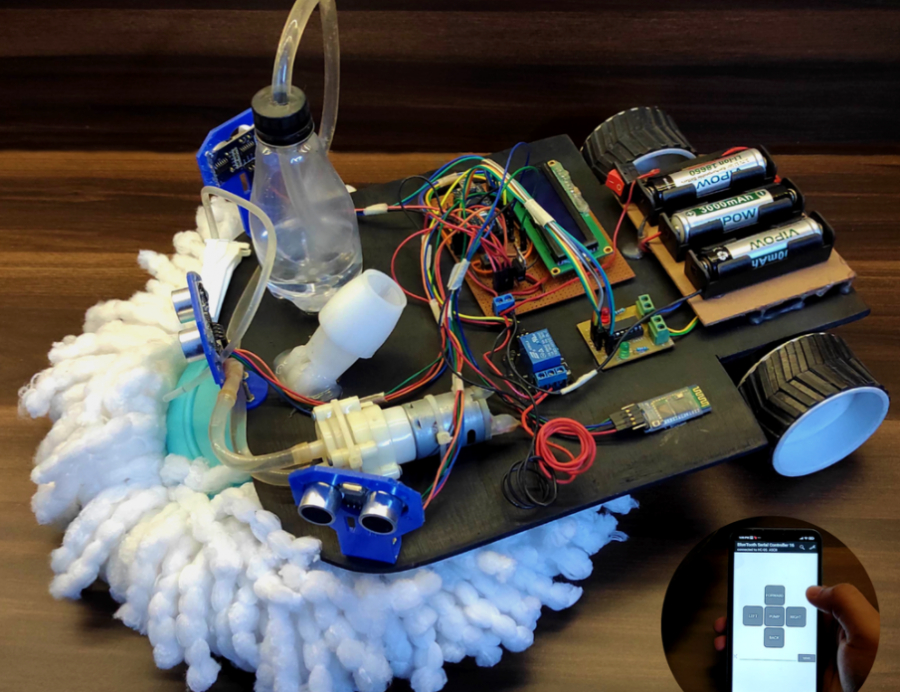
Рисунок 12. Тестирование робота-мойщика и его приложения
Включите робота и проверьте, отображается ли на ЖК-дисплее приветственное сообщение. Если это не так, попробуйте настроить потенциометр триммера или перепроверьте соединения.
На телефоне включите Bluetooth и выполните поиск устройств. Соединитесь с HC-05. Пароль будет «0000» или «1234». Теперь проверьте, движется ли робот при нажатии кнопок на вашем телефоне. Если он не двигается, проверьте, отображается ли команда на ЖК-дисплее. Если всё отображается правильно, но движения нет, это означает, что Arduino правильно получает команду. Тогда это может быть проблема с соединениями драйвера двигателя.
Если робот не двигается и ничего не отображает на ЖК-дисплее, проверьте, правильно ли подключен ваш модуль Bluetooth. Провод Tx на модуле Bluetooth должен идти к Rx на Arduino и наоборот. Также проверьте, правильно ли вы установили команды в приложении. Если ни тот, ни другой совет не помогли избавиться от проблемы, вернитесь к самому первому шагу и еще раз проверьте все подключения по схеме из первой части инструкции.

Ваш робот-помощник готов! Теперь вы можете спокойно смотреть телевизор или играть в любимые видеоигры вместо того, чтобы тратить свои выходные на энергозатратный процесс уборки. Главное — вовремя спрятать робота, когда к вам придут гости, иначе придётся собирать таких же домашних роботов для каждого. Делитесь с нами вашими устройствами в телеграмм-канале.
Светодиоды, Arduino и левитация – как собрать магнитную лампу
Автор Дарья Алексеева
Начинающий 3D-дизайнер Том Оуверкерк показал нам удивительное сочетание развитых технологий и уютного волшебства в своём новом проекте на Arduino. Настольная лампа с парящими светодиодами выглядит эффектно и на какое-то время сбивает с толку. Но магия, лежащая в основе, очень проста: один магнит, спрятанный наверху, притягивает второй магнит, спрятанный в корпусе рассеивателя со светодиодами. Простая физика, а выглядит волшебно. Интересно, как такое собрать?

Инструкция по созданию магнитной светодиодной лампы уже перед вами. Главное, на что стоит обратить внимание перед сборкой – 3D-печать. Том Оуверкерк смоделировал здесь каждую деталь. Он добился идеального соотношения размеров и форм, и, собрав все элементы вместе, получил устойчивую и практичную конструкцию, в которой еще и магниты можно спрятать.
Для тех, кто чувствует себя уверенно в 3D-моделировании, разработка лампы с оригинальным дизайном может стать хорошей творческой задачей, но не обязательной в рамках описанного проекта. Ведь Том поделился необходимыми 3D-моделями в формате STL на специальной площадке Cults, а мы сделали их доступными для скачивания на нашем сайте.
Таким образом, от моделирования можно отказаться и сразу приступить к сборке проекта. Самое время узнать, какие материалы понадобятся в процессе:
– Белый пластик для 3D-принтера;
– Светодиодная лента WS2812 60LED;
– 2 неодимовых магнита 12х5 мм;
– Arduino Nano Every;
– Блок питания для светодиодной ленты 5V;
– Разъём питания гнездо 2.1х5.5 мм 12V с клеммной колодкой;
– Силиконовый белый провод 22AWG (0,35 мм2);
– Монтажные провода.

Рис. 1. Все вышеперечисленные материалы
Основные инструменты:
– 3D-принтер
– Паяльник
– Плоскогубцы
– Отвёртка
– Суперклей
Шаг 1: Распечатать детали

Рис. 2. LAMP UNDERSIDE – основание лампы; LAMP BASE – основной корпус; DIFFUSION BODY – рассеиватель; DIFFUSION TOP – крышка рассеивателя; LAMP TOP – верхняя часть лампы; TOP CAP – верхняя крышка.
На этом рисунке конструкция лампы представлена в полусобранном виде. Это не попытка привить нам размышления о целостности, а всего лишь полезная шпаргалка на время сборки. И пригодиться могут не только визуальные образы деталей, но и их оригинальные названия: часто это помогает избежать путаницы в значениях и смыслах.
Поскольку 3D-модели уже есть, вам остаётся только подготовить их к печати с помощью программы-слайсера (Cura, Simplify3D, Craftware), разложить STL-файлы на тонкие слои, чтобы объяснить принтеру на его языке (G-code), как нужно выкладывать пластик.
По настройке печати есть всего две рекомендации: заполнение (плотность) 20-100% и печать без поддержек (по возможности). Остальные настройки – на ваше усмотрение, доверяйте личному опыту.
Если же вы совсем новичок в 3D печати, то ни в коем случае не поддавайтесь суете и не торопитесь. Изучите настройки, поиграйтесь с ними на тренировочной модели и приготовьтесь к тому, что не все детали получаются с первого раза.
А если вы только мечтаете о своём 3D принтере, то переходите в наш телеграм канал, где мы собираемся разыгрывать парочку таких красавцев среди подписчиков!
Шаг 2: Собрать рассеиватель и магнитную ось.

Рис. 3
Действия на этом этапе могут показаться сложными и запутанными. Но мы постараемся провести вас максимально ровным и простым путём.
Цель всей сборки – проложить стабильную электрическую цепь. Цель данного этапа – связать кучку светодиодов с магнитом, чтобы он притягивал их к себе.
Прежде, чем начать, подготовьте необходимые материалы:
– три провода по 130 мм в длину (отрежьте от силиконового провода 22AWG);
– кусок светодиодной ленты, который легко помещается внутри рассеивателя;
– паяльник;
– рассеиватель, его крышка и верхняя часть лампы;
– магниты и суперклей.
Примерная последовательность действий:
1) Припаяйте все три провода к контактам светодиодной ленты, как на рисунке 4, а противоположные концы пометьте опознавательными знаками, чтобы не запутаться, когда придёт пора подключать их к Arduino.

Рис. 4
2) Протяните провода через маленькое отверстие в корпусе рассеивателя, и тяните до тех пор, пока светодиоды не окажутся внутри, как на рисунке 5. Нанесите немного клея на обратную сторону светодиодной ленты и аккуратно прижмите её к стенкам рассеивателя: светодиоды должны прочно закрепиться здесь.

Рис. 5
3) Заплетите косичку из проводов (рис. 6). В основном это делается ради удобства, но и доля эстетики есть.

Рис. 6
4) Возьмите один магнит и приклейте на внутреннюю сторону крышки рассеивателя (рис. 7).

Рис. 7
5) Второй магнит установите в верхней части лампы, как на рисунке 8.

Рис. 8
Закройте рассеиватель крышкой и проверьте притяжение ваших магнитов. Если всё было сделано правильно, то рассеиватель будет тянуться ровно вверх, как гелиевый шарик.
Магнитная ось готова, теперь нужно позаботиться об электропитании и управлении.
Шаг 3: Подготовить блок питания
Это маленькое подготовительное действие позволит создать площадку для дальнейшей связи светодиодов с Arduino.
Возьмите разъём питания 12V с клеммной колодкой (тот, что зовётся мамой) и приклейте к основанию лампы, как на рисунке 9.

Рис. 9
Теперь возьмите два монтажных провода (красный и чёрный) и подсоедините к клеммным колодкам (рис. 10)

Рис. 10
Эти провода потянутся к пинам Arduino уже на следующем этапе, но пока пусть полежат здесь.
Шаг 4: Закрепить и спаять

Рис. 11
На рисунке 11 видно, как провода от светодиодов проходят сквозь специальное отверстие в подставке и фиксируются изолентой с обратной стороны: это сделано, чтобы обезопасить сборку от внезапного вылета светодиодов и проводов далеко вверх.
Обязательно отрегулируйте высоту, на которой располагается ваш рассеиватель света. Он не должен быть слишком высоко, чтобы вся конструкция не испытывала напряжения от чрезмерного магнетизма, но и слишком низко располагать его не стоит: ослабнет влияние верхнего магнита – пропадёт вся магия. Не поленитесь и потратьте время на поиск золотой середины. а потом закрепите светодиодный провод, как на рис. 11.
Теперь можно взяться за паяльник. Для наглядности мы разместили распиновку Arduino Nano Every чуть ниже (рисунок 12).
1) Вернитесь к тем двум проводам, которые остались у разъёма питания, и подсоедините их к пинам VIN и GND на Arduino.
2) Возьмите провода светодиодной ленты и припаяйте их к пинам GND, V5 и цифровому порту (D1 – D12). Надеемся, что вы не забыли как-то обозначить провода перед тем, как завязать в косичку.

Рис. 12
Мы всё спаяли, а значит пора двигаться дальше, к финальному этапу.
Шаг 6: Программирование Arduino
Подробно о принципах работы Arduino мы рассказывали ранее. Если вы еще не сталкивались с программированием этой платформы, то первое, с чего стоит начать – установка Arduino IDE (локальная копия). Это не просто ПО с командной строкой, это самый настоящий мост между мирами. Здесь люди и аппаратные платформы говорят на одном языке и помогают друг другу развиваться. Ни один Arduino-проект не обойдется без программной среды. Включая тот, что мы только что собрали.
Светодиодная лампа – очень приятный проект для программирования, потому что для управления светодиодами есть специальная библиотека FastLed. Нужно зайти в Arduino IDE, открыть Library Manager, найти в нём нужную библиотеку и установить.

На этом сборка магнитной левитирующей лампы завершена. Для вас открывается бесконечная дорога апгрейдов и дополнений. Заметили, как много свободных входов/выходов осталось на платформе? Может, стоит задуматься о расширении функционала?
Если у вас появились идеи по улучшению сегодняшней сборки, обязательно поделитесь с нами.
Всем решившимся на реализацию проекта – успехов и вдохновения!
До встречи в будущих проектах!
В последнее время цены на бытовую технику растут с каждым днем, оставляя многих из нас без желанных помощников по дому. Те, кто мечтал о роботе-пылесосе вынуждены делать влажную уборку вручную и тратить на это много времени и сил. В этой статье мы расскажем вам как собрать робота-мойщика полов своими руками!
Гайд будет состоять из двух частей. В этой инструкции мы подробно разберём материалы и схему подключения, необходимые для создания помощника в домашней уборке. В следующей статье мы расскажем о сборке самого робота и настройке приложения для него. Пока вы будете заниматься своими делами, ваше изобретение будет приводить квартиру в порядок! Им можно будет управлять с помощью смартфона по Bluetooth. Мы будем использовать три ультразвуковых датчика и переключатель с фиксацией для того, чтобы выбирать автономный или ручной режим работы робота.
Материалы:

Рисунок 1. Запасы для создания робота
- Arduino Nano (или любая другая совместимая плата);
- Bluetooth-модуль HC-05;
- Плата драйвера двигателя L293D (также подойдет L293 или любой другой драйвер двигателя);
- Три ультразвуковых датчика HC-SR04;
- Три зажима для ультразвуковых датчиков;
- ЖК-дисплей 16x2;
- Одноканальный релейный модуль 5 В;
- Два мотор-редуктора на 100 об/мин (или от 50 до 500 об/мин);
- Два колеса для двигателей;
- Два зажима для двигателей;
- Мембранный водяной насос 12 В;
- Три литий-ионных аккумулятора 18650;
- Держатель для 3 ячеек;
- 7805 Регулятор напряжения;
- Резисторы 1К, 2К, 10К (по 1 шт.);
- Штекеры и гнёзда;
- Винтовая клемма;
- Кнопка с фиксацией;
- Переключатель включения/выключения;
- Фанера толщиной 6 мм;
- Провода-перемычки;
- Проволока;
- Гайки и болты;
- Насадка для вращающейся швабры (входит в комплект вращающейся швабры и ведра);
- Виниловые трубки;
- Капельница для глюкозы (можно найти в медицинских магазинах);
- Маленькая бутылка с водой (как резервуар для воды);
- Паяльник;
- Дрель;
- Кусачки;
- Отвёртка;
- Плоскогубцы.
Шаг 1: Подготовка основы

Рисунок 2. Схема основы
Для начала нужно подготовить основу нашего робота-мойщика. В качестве материала советуем использовать простую фанеру толщиной 6 мм. Если захотите сделать робота на более толстой основе, рассчитывайте свои размеры в зависимости от колёс, которые будете использовать в сборке. Обратите внимание на простой 2D CAD на рисунке 2, который нужно использовать при подготовке изделия. Вырезаем шаблон ножёвкой, затем используем плоский напильник, чтобы скруглить два угла спереди. После этого шлифуем их наждачной бумагой и красим основание в любой цвет..
Шаг 2: Установите двигатели на основу

Рисунок 3. Закрепление монтажных уголков на основе
Сделайте разметку, соответствующую рисунку 3 (4 см снизу, 3 см сбоку) и болтами прикрутите к основе угловые крепления. На этом месте у нас будет располагаться двигатель. Не забывайте, что слева и справа будут размещены колеса, поэтому корректируйте измерения под те, которые вы выбрали для своего робота, но помните, что если колёса будут слишком большими, швабра будет не полностью касаться пола, из-за чего качество уборки снизится.

Рисунок 4. Двигатели на основе.
Перед присоединением двигателей к кронштейнам, припаяйте к ним два провода (рисунок 4). После это будет сделать тяжелее.

Рисунок 5. Основа с колесами
Просверлите восемь отверстий для проводов двигателей (2,5 см от колеса, 0,5 см друг от друга), затем присоедините к изделию колёса. Убедитесь, что при вращении им ничего не мешает, если такая проблема появилась, подрежьте основу.
Шаг 3: установка зажимов

Рисунок 6. Отверстие для швабры
Следующий шаг — проделать отверстие для вашей швабры. Ориентируйтесь на её размер и сделайте индивидуальные вычисления, чтобы швабра идеально встала в основу.

Рисунок 7. Зажимы для швабры
Установите зажимы, чтобы швабра не упала во время уборки пола. Их можно заказать в любом интернет-магазине или напечатать на 3D-принтере. Для проектирования таких деталей отлично подойдет программа TinkerCAD — она проста в использовании и не требует серьёзных системных требований от вашего компьютера. Расположите зажимы таким образом, чтобы один (посередине) был направлен вперёд, а два других смотрели влево и вправо под углом 45 градусов.
Шаг 4: полная схема устройства

Рисунок 8. Схема робота
Прилагаем полную схему со всеми частями робота. Она была разработана с помощью приложения Fritzing. Вам нужно будет строго следовать схеме в следующих шагах. На ней видны все нужные нам подключения. Обратите внимание, резисторы 1K и 2K подключены к контакту Tx на Arduino для создания делителя напряжения.
Шаг 5: Сборка схемы

Рисунок 10. Подключение разъёмов
Возьмите кусок перфорированной платы (нулевой печатной платы). Чтобы разместить Arduino. Сначала припаяйте несколько разъёмов с гнёздами, а затем подключите к каждому разъём со штекерами. Он соответствует каждому контакту на Arduino. Все внешние компоненты будут подключены к этим штекерным разъёмам (смотри рисунок 9). Если у вас есть трудности с процессом пайки, посмотрите видео о том, как быстро и легко научиться паять.

Рисунок 11. Подключение регулятора и переключателя
Чтобы подключить ЖК-дисплей, снова припаяйте несколько гнёзд. Добавьте на печатную плату винтовую клемму (для подключения питания от батареи), фиксирующий переключатель и регулятор напряжения. Припаяйте несколько штекерных разъёмов перед регулятором напряжения (смотри рисунок 11).

Рисунок 12. Добавляем провода
Теперь добавьте все резисторы и соедините всё по схеме с помощью проводов.
Зачем использовать внешний регулятор напряжения, если он уже встроен в Arduino? Поскольку мы используем множество компонентов, которые должны питаться от 5 В (3 ультразвуковых датчика, модуль bluetooth, драйвер двигателя, реле, ЖК-дисплей), Arduino может перегреться и повредить его регулятор. Мы будем подключать некоторые компоненты к внешнему стабилизатору напряжения 5 В во избежание подобных ситуаций.
Шаг 6: подключение к основной плате

Рисунок 13. Подключение по схеме
Продолжайте следовать схеме из шага 5. Начните с подключения модуля Bluetooth, затем релейной платы и драйвера двигателя. Последними подключите сами двигатели к их драйверу. Рекомендуем размещать элементы с помощью клея (Рисунок 14).

Рисунок 14. Итоговый вид.
Подключите все три ультразвуковых датчика к соответствующим контактам с помощью перемычек, как показано на схеме. Поскольку наши зажимы датчиков уже на месте, приклейте датчики к зажимам горячим клеем.

Рисунок 15. Ультразвуковые датчики.
Шаг 7: механизм распыления воды

Рисунок 16. Водяной насос
Для распыления воды мы будем использовать мембранный насос на 12 В с очень простым механизмом. Есть две трубы: входная, которая идёт к резервуару для воды и выходная, которая идёт к швабре.
Для входной трубы используем трубку толщиной 8 мм, а для выхода более тонкую. В качестве резервуара для воды используется небольшая бутылка объемом 200 мл. Убедитесь, что вы подсоединили впускную и выпускную трубы в соответствии с маркировкой на водяном насосе (рисунок 16).
В этой статье мы проделали основную работу — разобрались со схемой подключения, сделали основу для будущего робота и присоединили основные элементы. В следующей части мы завершим подключение робота и настроим приложение для робота-помощника. Совсем скоро вы сможете гордо презентовать вашего робота членам семьи, самое главное — не потерять запал и собрать устройство до конца!

В прошлой статье мы подробно разобрали создание каркаса для нашей будущей аквапоники, разобрались с системой орошения и перешли к самому ответственному шагу — датчикам. В этой инструкции нам предстоит разобрать процессы подключения всех датчиков, а также выполнить итоговую сборку устройства. Если вы пропустили первые этапы создания аквапоники, переходите по ссылке и присоединяйтесь!
Шаг 1: Подключаем датчики

Рисунок 1. Обрежьте провода.
Давайте разберем, как и к чему подключаются все наши датчики. Для того чтобы упростить этот процесс, мы подключим их к одному источнику питания. Первая задача — обрезать чёрный, зелёные и красные провода до 5 см. Будьте осторожны, не отрежьте случайно линии передачи данных. Зачистите провода питания и скрутите концы вместе (смотри рисунок 1).
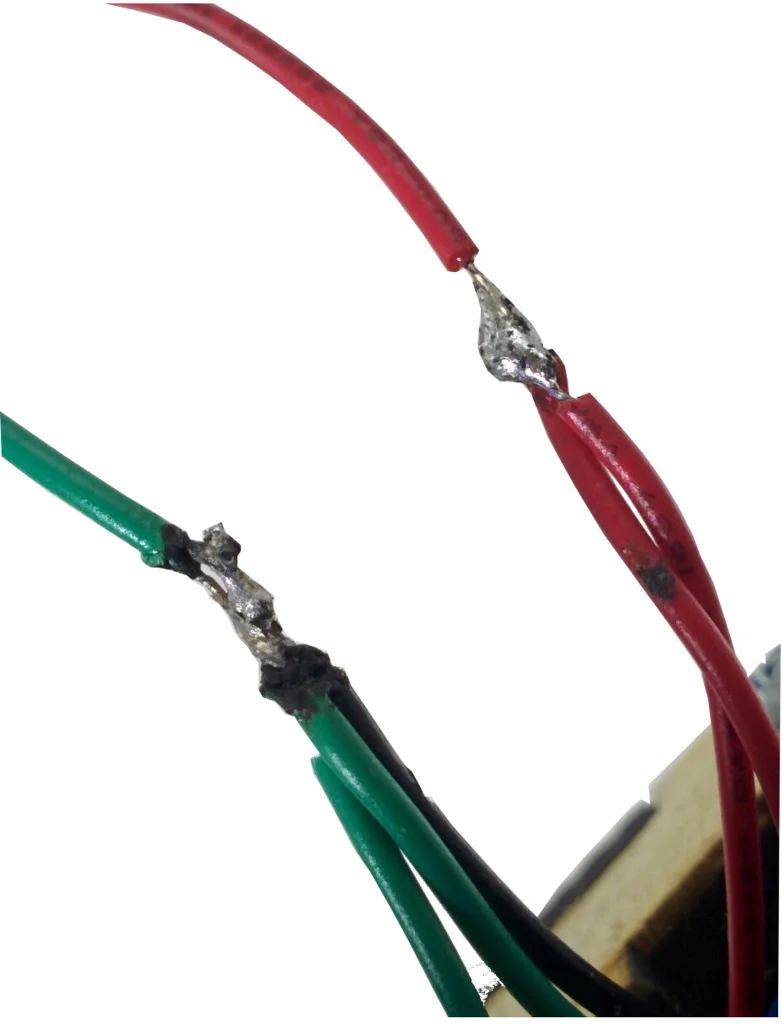
Рисунок 2. Залудите провода
Для фоторезистора LDR можете использовать один любой провод для заземления, а другой для передачи данных. Залудите зачищенный конец с помощью паяльника и припоя. Припаяйте и соедините LDR с проводами питания от коробки датчика, как показано на рисунке 2.

Рисунок 3. Соединение термоусадочной трубкой
Отрежьте короткие куски термоусадочной втулки, чтобы закрыть паяные соединения (~ 1 см) и проденьте их через другой конец провода заземления и +Vcc (рисунок 3). Усадите их, используя горячий воздух, например, фен, чтобы установить электрическое соединение (изображение 4).

Рисунок 4. Усадка проводов
Теперь обратим внимание на другие концы проводов коробки датчиков. Нам нужно соединить их со штыревыми разъёмами печатной платы, как показано на 5 рисунке. Вставьте термоусадочную трубку, прежде чем припаивать провод к разъёму.
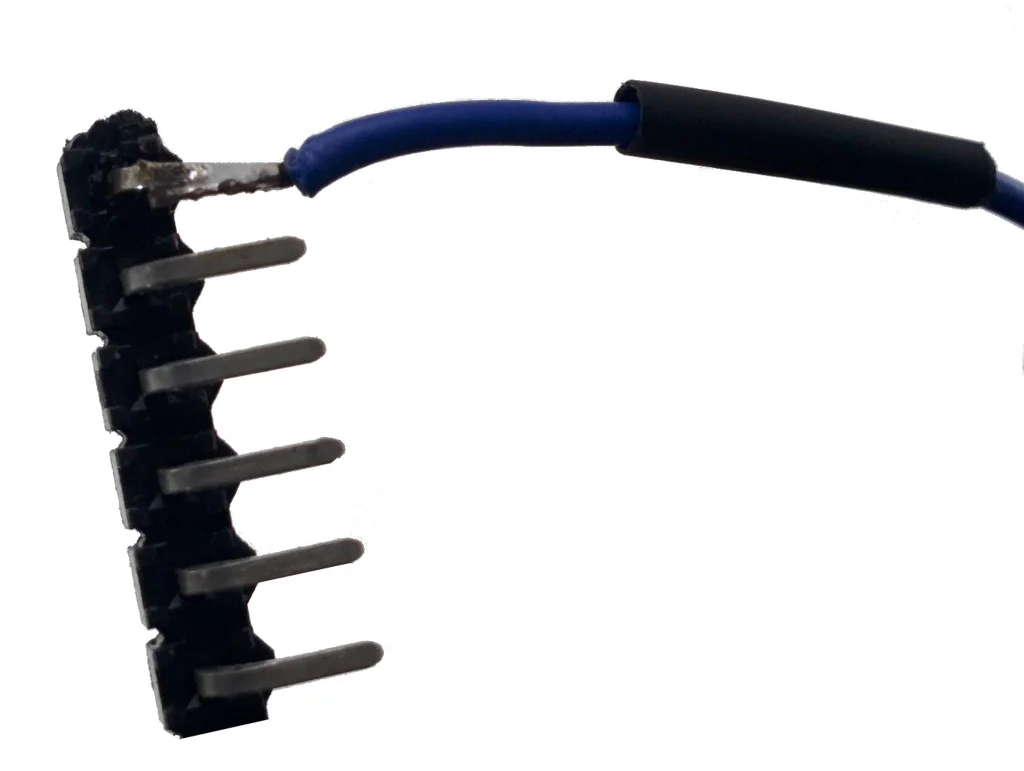
Рисунок 5. Припой к разъёму
После отламывания и усадки головки печатной платы провод должен выглядеть так же, как на изображении 6.

Рисунок 6. Готовый провод
Проделайте те же действия с другими проводами коробки. На рисунке 7 показан готовый блок датчика с разъёмами для передачи данных и питания.

Рисунок 7. Готовый блок
Шаг 2: Подключение датчиков уровня воды и температуры

Рисунок 8. Поплавковый датчик
Поплавковый датчик используется для измерения уровня воды в аквариуме и располагается внутри него. Нам нужны длинные провода, которые мы подключим к штыревым разъёмам печатной платы (рисунок 8).

Рисунок 9. Укороченные провод датчика
Однопроводной датчик температуры измеряет температуру воды внутри аквариума. Укоротите его примерно до 3 см и соедините со штыревыми разъёмами. Закрепите его термоусадочной трубкой, как показано на рисунке 9.
Шаг 3: датчик уровня роста
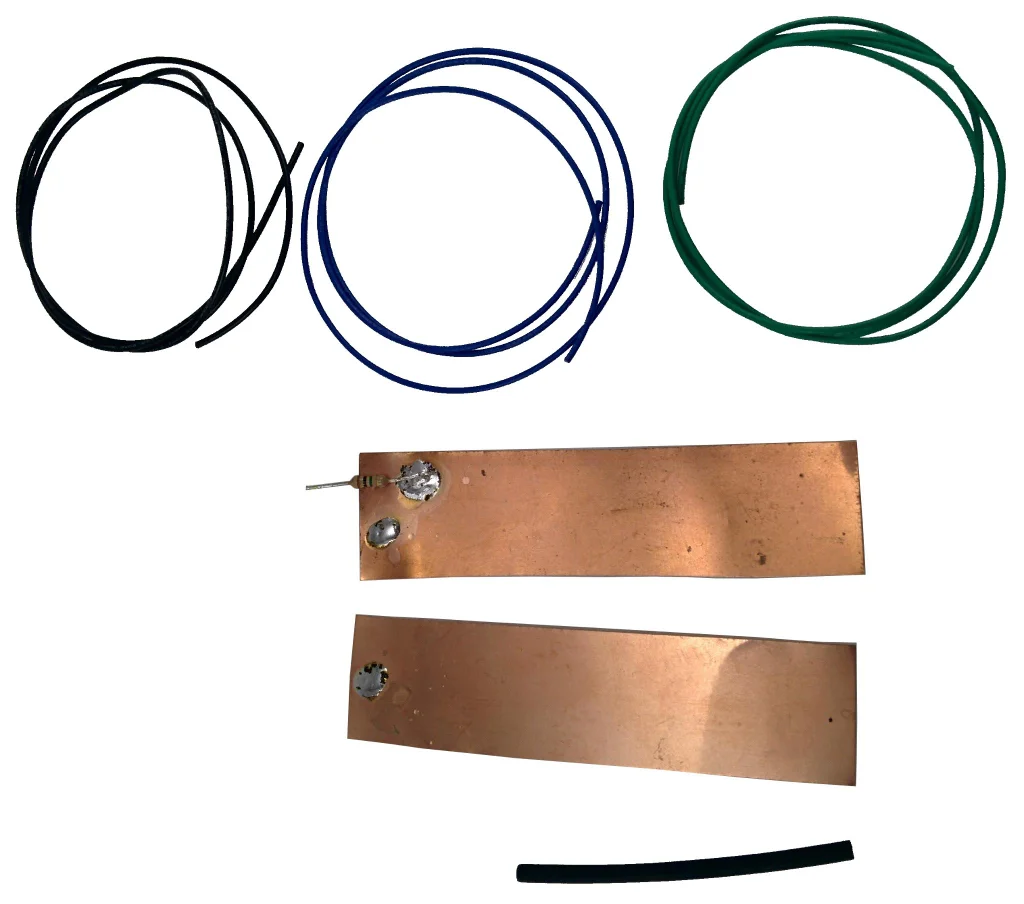
Рисунок 10. Детали ёмкостного датчика
Для определения уровня влажности в горшке мы будем использовать ёмкостный датчик. Мы соберём его из медных пластин, резистора 1 МОм, термоусадочной трубки и нескольких проводов (смотри рис. 10).

Рисунок 11. Точки подключения проводов на медной пластине
Начните с припайки резистора к медной пластине и добавления точек подключения проводов, как показано на рисунке 11. Возможно, вам придется соскоблить гидроизоляционный слой на пластинах в местах пайки, чтобы обеспечить хорошее соединение.
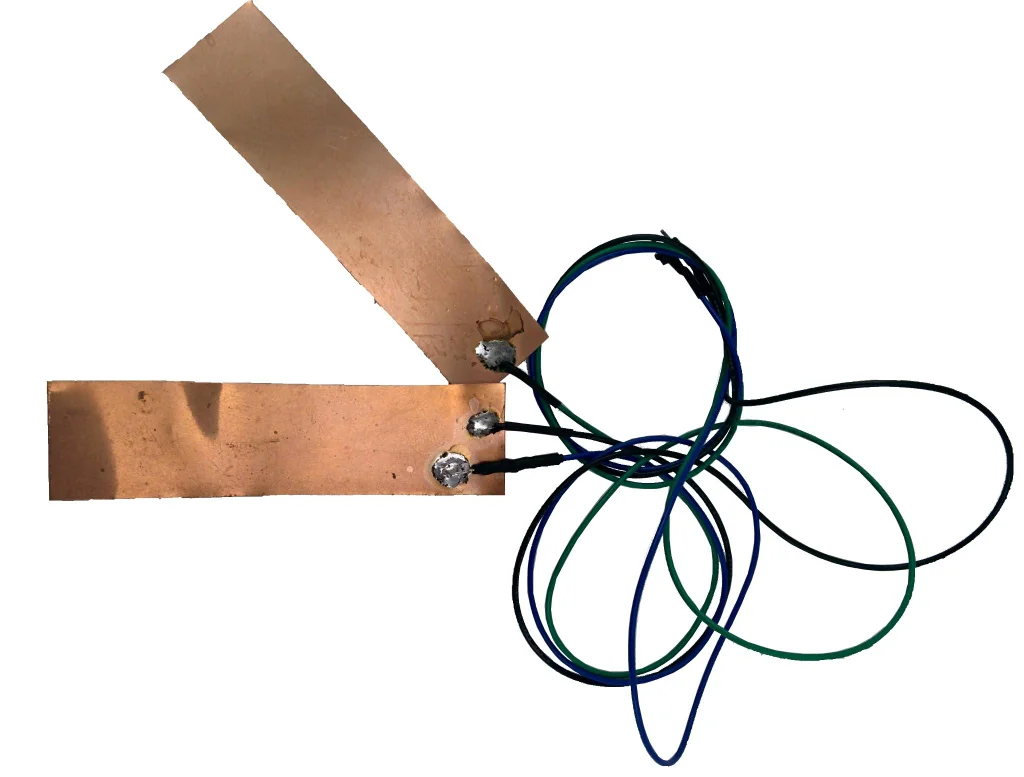
Рисунок 12. Готовый датчик
Используя провода, контакты печатной платы и термоусадочную трубку, завершите датчик, как показано на рисунке 12. Вторая пластина подключается к земле (зелёный провод), а две другие, синяя и чёрная, предназначены для отправки и получения данных.

Рисунок 13. Датчики авапоники
Шаг 4: Сборка крепления для датчиков

Рисунок 14. Материалы для крепления
Так как два датчика (поплавковый и датчик температуры) находятся внутри аквариума, нам необходимо сделать для них крепление. Оно устанавливается под грядкой с помощью скрепок и Т-образного паза.

Рисунок 15. Разметка первой скрепки
Для начала распрямите две скрепки. С помощью фломастера сделайте метки на одной из скрепок на расстояниях 1 см, 2 см, 6 см и 10 см от одного конца.

Рисунок 16. Места сгибов
Сложите скрепку так, чтобы образовались прямые углы на отметках 1 и 2 см (см. рисунок 16). На отметке 10 см надрежьте проволоку, удерживая её плоскогубцами и несколько раз согните.

Рисунок 17. Сгибы проволоки
Сделайте круг из срепки от отметки 10 см до 6 см (рисунок 18).

Рисунок 18. Петля на конце скрепки
Сложите петлю так, чтобы она была перпендикулярна согнутому противоположному концу, как показано на фото 19.

Рисунок 19. Положение петли
Соедините проволоку с поплавковым датчиков и зафиксируйте его с помощью уплотнительного кольца и гайки (рисунок 20).

Рисунок 20. Прикрепленный датчик

Рисунок 21. Разметка второй скрепки
Теперь возьмите вторую скрепку и сделайте на ней отметки на 1 см, 2 см, 5,5 см, 8,5 см и 12,5 см.

Рисунок 22. Сгибы проволоки
Проделайте те же действия, что и с предыдущей скрепкой. Согните петлю так, чтобы она была перпендикулярна согнутому противоположному концу под прямым углом. Создайте ещё один круг от кончика зажима до отметки 8,5 см. Согните первую петлю так, чтобы нижний конец был параллелен прямоугольным сгибам, нижнюю сгибайте до тех пор, пока она не станет параллельна верхней (смотри рисунок 22). Вставьте датчик температуры в полученный проволочный зажим.

Рисунок 23. Крепление с датчиком
Выпрямите проволоку для поплавкового датчика и вставьте его в паз, как показано на рисунке 24. Затем верните все сгибы в исходное положение.

Рисунок 24. Присоединение поплавкового датчика
Вставьте конец скрепки в соседнее отверстие (рисунок 25). Затем подобным образом присоедините к пазу датчик температуры в следующие два отверстия.

Рисунок 25. Присоединение датчика температуры
Теперь нам нужно присоединить крепление к нашей аквапонике. Протяните провода датчиков через паз, как показано на рисунке 26.
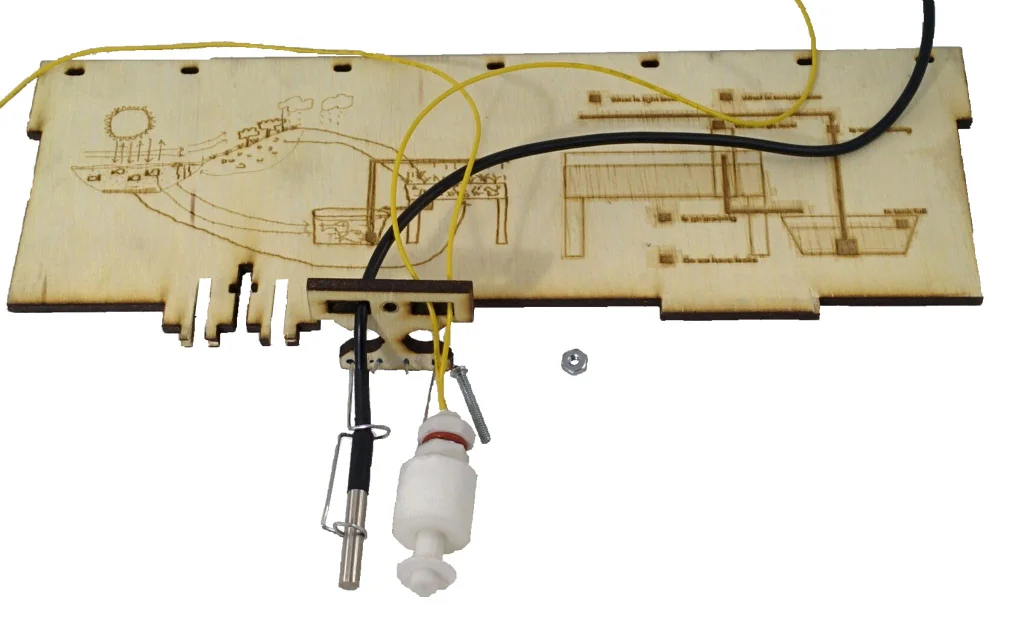
Рисунок 26. Крепление на части аквапоники
Крепление соединяется с Т-образным пазом панели аквапоники нижней части. Рекомендуем прикрепить деталь с помощью болта, чтобы избежать отсоединений при эксплуатации.
Шаг 5: Подключение датчиков к схеме

Рисунок 27. Переключатели контроллера
Начинаем с настройки двухпозиционных переключателей — установите переключатели 1, 2, 8 в положение ON (смотри рисунок 27).

Рисунок 28. Подключение силовых линий
Подключите силовые линии блока датчиков к контроллеру v2 на +5V и GND (рисунок 28).
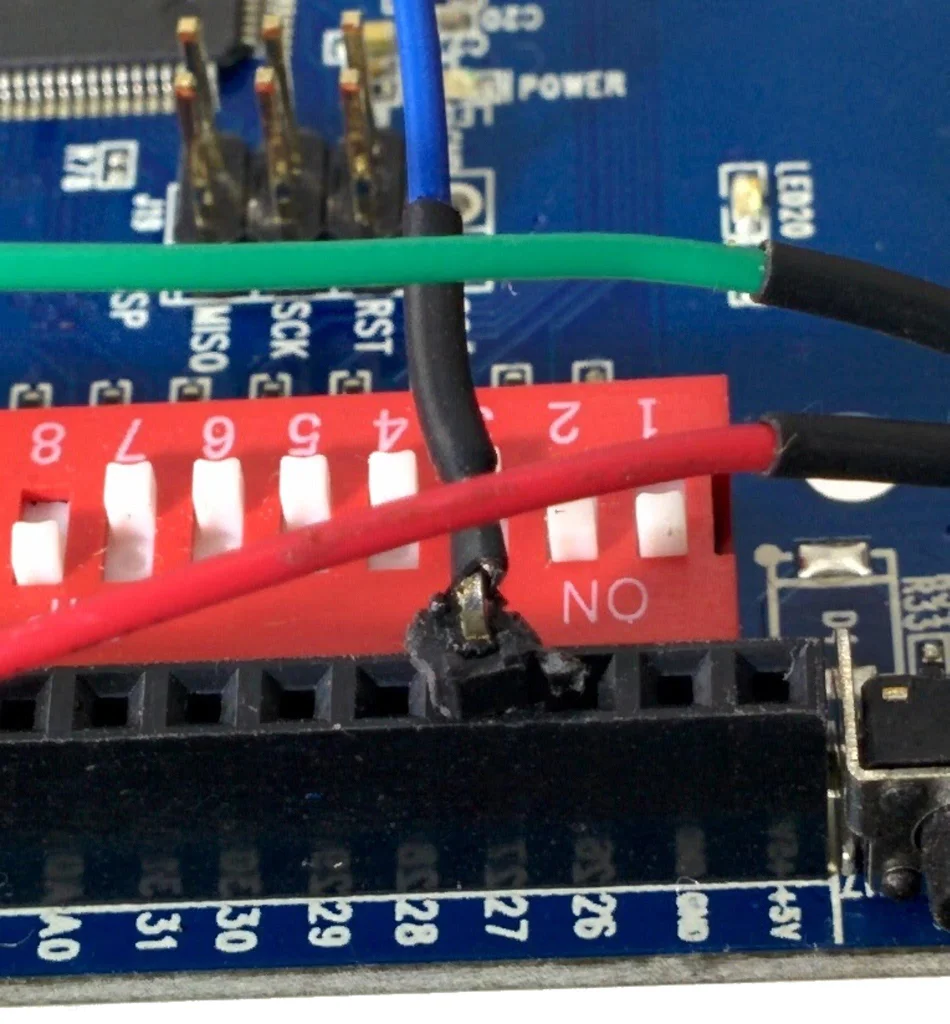
Рисунок 29. Подключение датчиков
Подсоедините провод датчика влажности к контакту 27. Далее подключаем датчик приближения к пину 6.
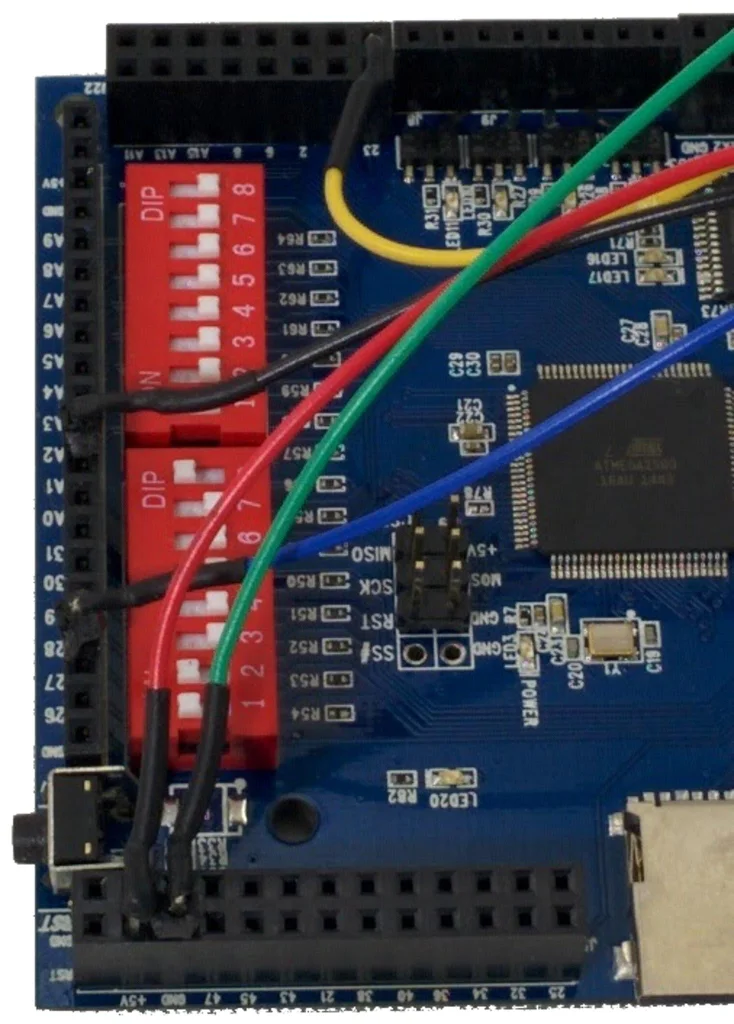
Рисунок 30. Подсоединение проводов
Подключите остальные провода согласно изображению 30. Будьте внимательны.

Рисунок 31. Подключение датчиков, расположенных внутри аквариума
Следующий шаг - подключение к контроллеру v2 датчиков, которые будут находиться внутри аквариума. Начнём с датчика температуры аквариума (смотри рисунок 32).
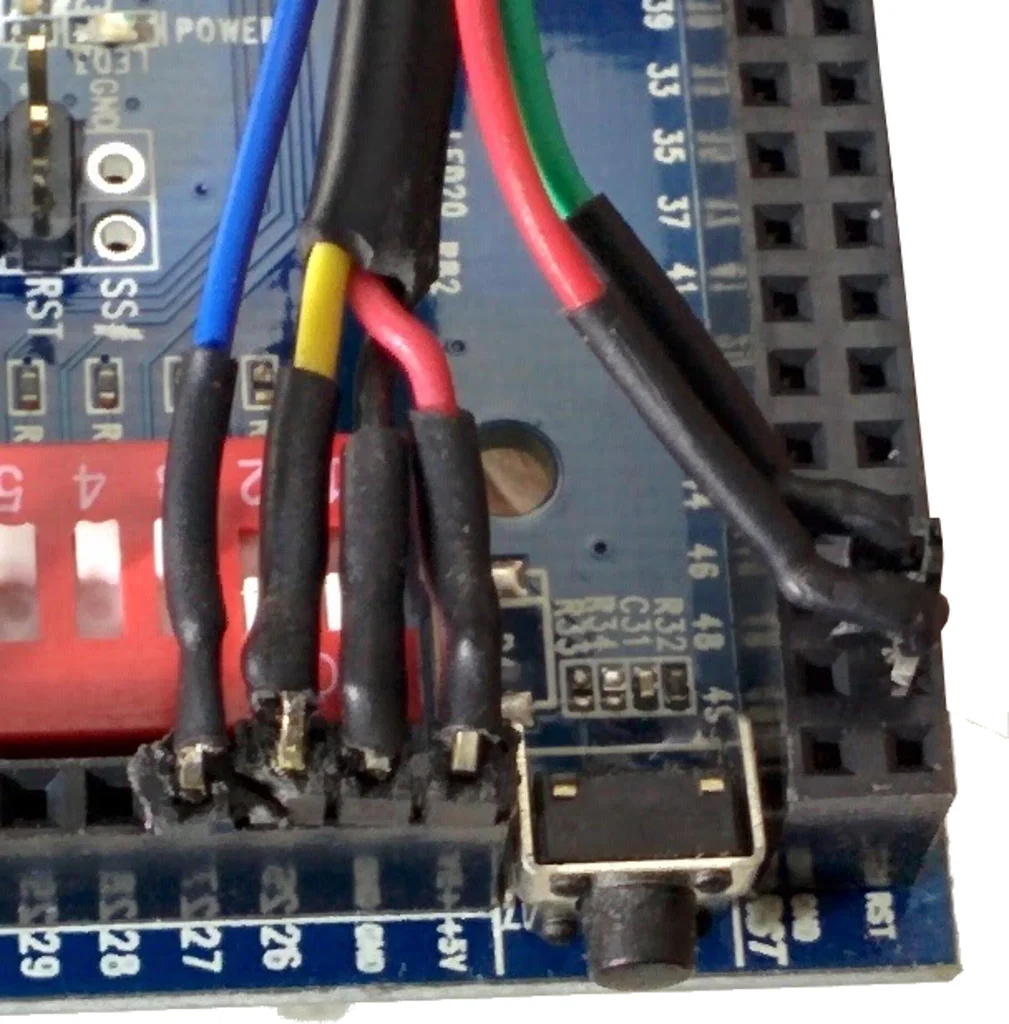
Рисунок 32. Подсоединение датчика температуры
Затем подключите один из проводов поплавкового выключателя к D8, а другой к любому заземлению, например к GND рядом с D23 (фото 33).

Рисунок 33. Подключение поплавкового датчика
На рисунке 34 вы можете посмотреть полное подключение всех датчиков к нашей будущей аквапонике.

Рисунок 34. Готовый вид
Шаг 6: Сборка аквапоники

Рисунок 35. Крепление датчиков
Блок датчиков крепится к передней панели аквапоники с помощью пазов. Крючки коробки вставляются в отверстия, а провода проходят через среднюю прорезь, как показано на рисунке 35.
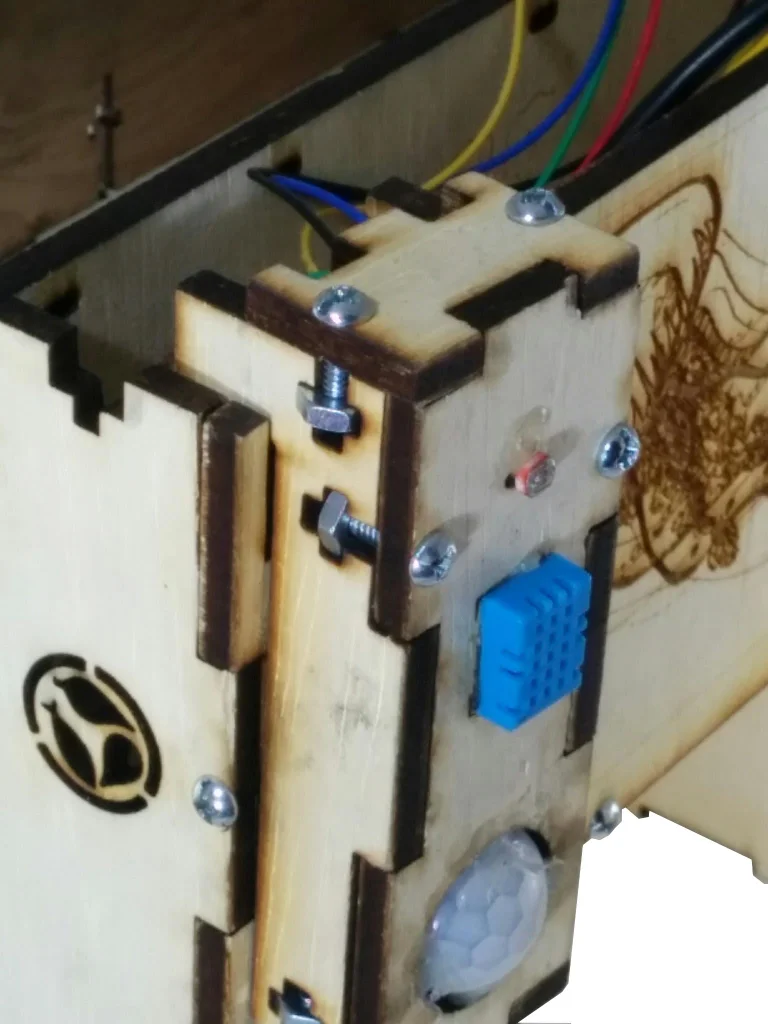
Рисунок 36. Готовое крепление
Аккуратно, но с усилием нажмите на блок, пока он полностью не вставится в переднюю часть аквапоники (изображение 36).

Рисунок 37. Защитная коробка с прорезью
Теперь можно протянуть провода контроллера через защитную коробку. Для начала нам нужно оторвать слот рядом с переключателем сброса (рисунок 37). Оторвем слот рядом с переключателем сброса, как показано на рисунке.
То же самое проделайте с крышкой коробки, ориентируясь на рисунок 38 и закройте коробку.

Рисунок 38. Готовый вид
Вставьте коробки с контроллером в аквапонику (изображение 39).

Рисунок 39. Размещение контроллера
Нам осталось до конца собрать систему орошения и обеспечить взаимодействие аквариума с грядкой. Обратите внимание на рисунок 40, повторите соединения.
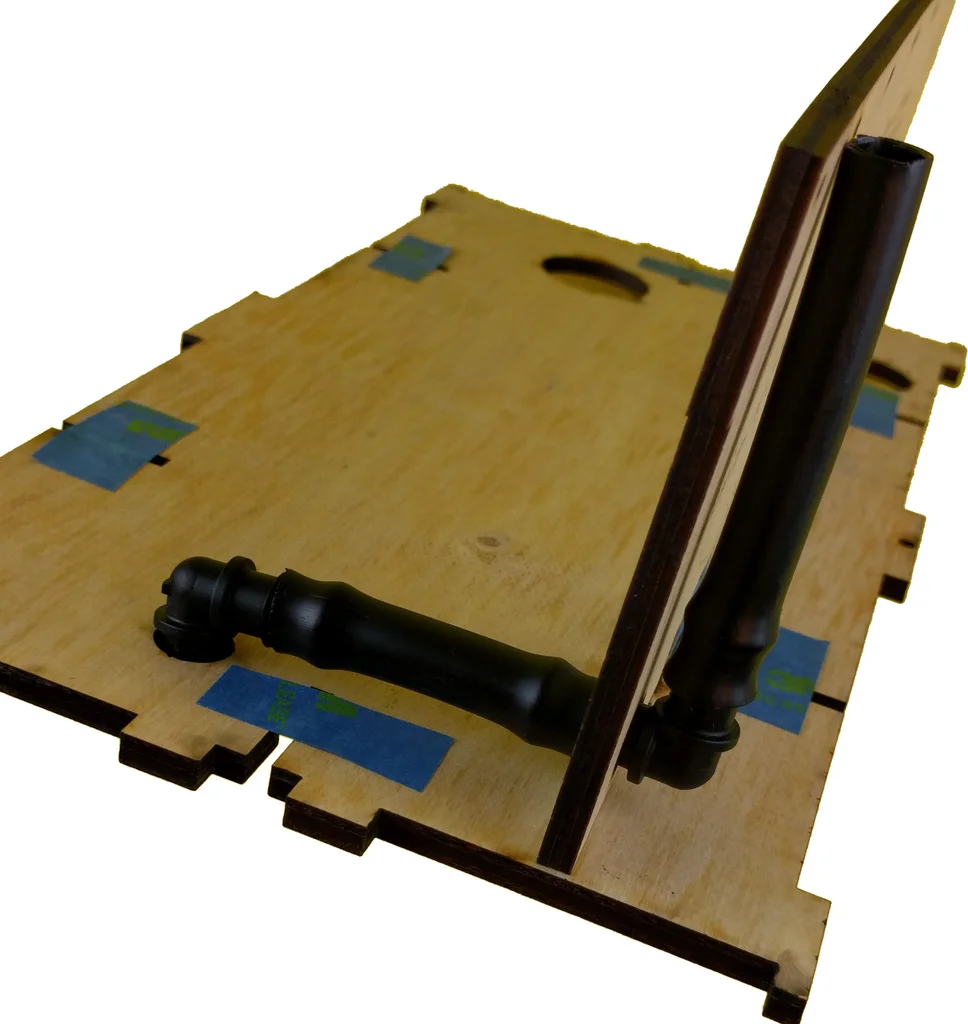


Рисунок 40. Монтаж насоса
Следующий шаг - добавление насоса. Он находится внутри аквариума в самом начале ирригационной трубки. Соединение будет проходить под вкладышем (здесь он не показан для ясности). Так как насос — это электромагнитное устройство, он потребует стабилитрона для защиты электроники от обратной ЭДС (электродвижущая сила). Посмотрите изображения с 41 по 44 и повторите соединения.
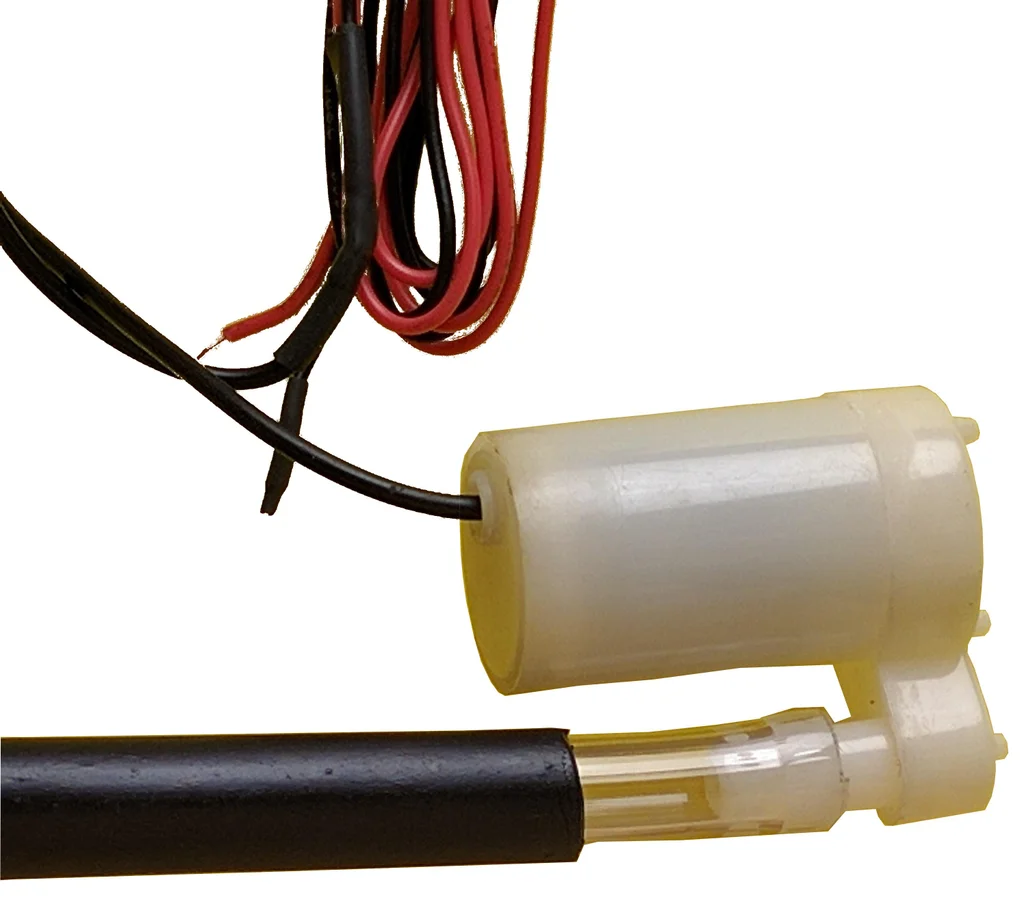

Рисунок 41. Вставьте насос с проводами.


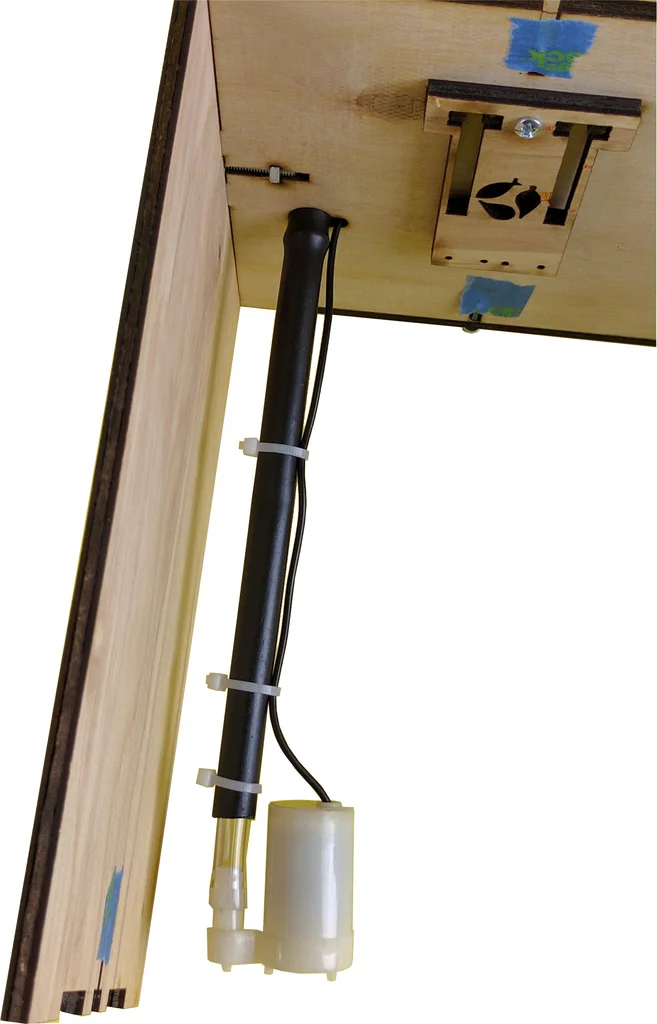
Рисунок 42. Проведите провода в лунку


Рисунок 43. Прикрепите провода к корпусу


Рисунок 44. Усадите термоусадочную трубку
Осталось добавить дренаж. Вставьте комплект в отверстие и поместите аквариум под короб.

Рисунок 45. Дренаж

Теперь можно смело запускать рыбок и запасаться семенами. Ваша аквапоника готова к использованию! Самое главное — не показывайте устройство своим друзьям, ведь при виде этого чуда, они заставят вас собрать для них такое же. Делитесь своими работами в нашем телеграмм-канале, будем рады опубликовать ваши эксперименты.








